

Obstacle-crossing mechanism of rod piece climbing robot
A technology of robots and rods, which is applied in the climbing field of power transmission systems, can solve the problems that the opening size of the jaws is difficult to adapt to the change in diameter, the robot's adaptability to the diameter of rods is reduced, and the versatility and applicability are poor, so as to achieve good flexibility. , low production cost, simple and compact structure
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
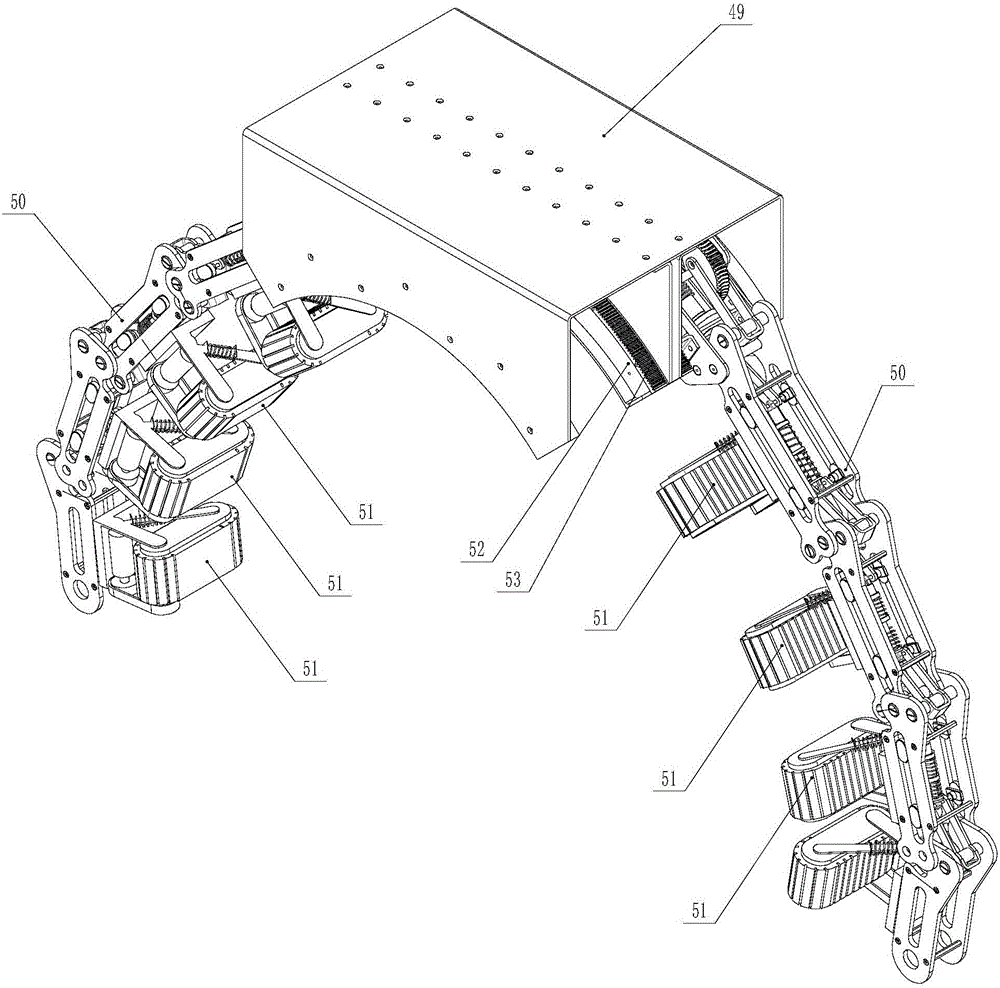
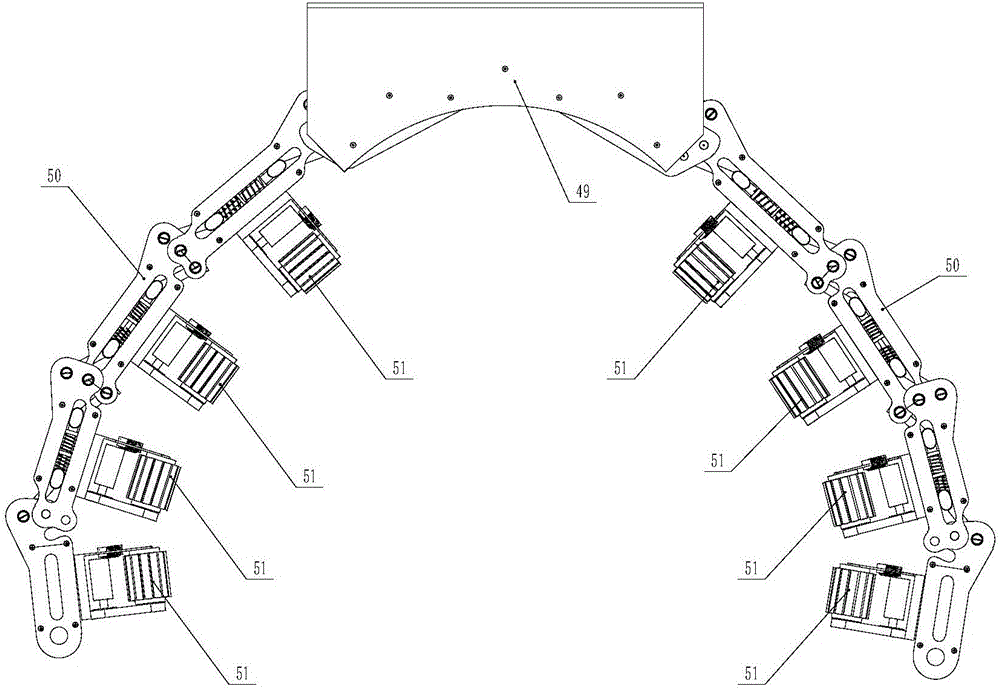
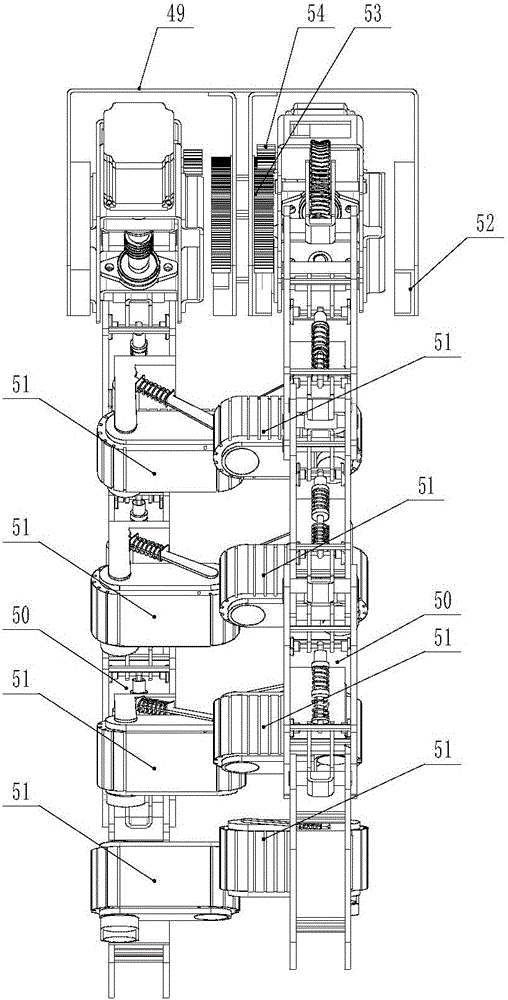
[0025] refer to Figure 1-10 As shown, a bar climbing robot obstacle-climbing mechanism includes a fuselage 49, an embracing mechanism 50 and a climbing mechanism 51. The fuselage 49 is provided with two arc-shaped guide grooves 52 arranged side by side. There are two embracing mechanisms 50 , and the two embracing mechanisms 50 are arranged opposite to each other and coaxially cooperate with a guide groove 52 respectively. The climbing mechanism 51 is arranged on the embracing mechanism 50 .
[0026] The encircling mechanism 50 includes a drive mechanism, an encircling executive mechanism and an encircling force application mechanism. The drive mechanism includes a box body 1, a stepping motor 2, a shaft coupling 3, a rear bearing seat 4, a front bearing seat 5, a worm 6, Incomplete worm gear 7, worm gear shaft 8, main push rod 9, push rod shaft 10 and circlip, the stepping motor 2 is fixed on the rear end of the box body 1, and the stepping motor 2 is connected to the worm t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More