

Spacecraft autonomous fly-around intersection control system verification device and spacecraft autonomous fly-around intersection control method
A technology of a control system and a verification method, which is applied in the field of the verification device of the control system of the spacecraft autonomous rendezvous and rendezvous, can solve the problems that the test time should not be too long, the ground verification site is limited, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
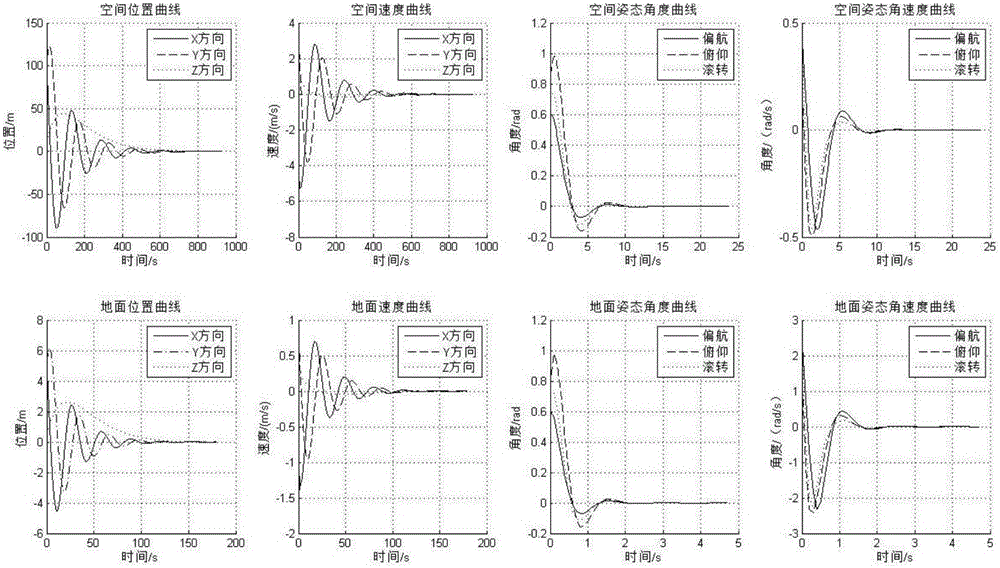
[0048] This embodiment intends to illustrate the running state of the ground simulator under the method proposed by the present invention through simulation.
[0049] The semi-major axis of the target spacecraft’s orbit is a=6907900m, the eccentricity e=0.5, the attitude angle is 0rad, and the initial position of the tracking spacecraft relative to the target spacecraft is X ct0 = 100m, Y ct0 = 100m, Z ct0 =10m, initial speed Initial attitude angle Ψ 0 =0.6rad, Φ 0 =0.8rad, Θ 0 =0.7rad,Ω 0 =(0.5,0.3,0.5)rad / s, the side length of the ground test site l=10m, the basic quantity is just like the ratio coefficient: λ L = 1 / 20, λ T =1 / 5, which means that the distance scale of the relative motion of the ground simulator is 1 / 20 times of the relative motion of the space spacecraft, and the time of the ground test is 1 / 5 of the real space time.
[0050] By designing the corresponding control algorithm for the autonomous rendezvous of the spacecraft, the plane simulation diag...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More