

Space robot minimal base disturbance trajectory planning method
A space robot and trajectory planning technology, applied in the field of computational aerospace, can solve the problems of complex genetic algorithm implementation, long convergence time, and inability to widely apply multi-degree-of-freedom space manipulators, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0039] The embodiments of the present invention are implemented on the premise of the technical solutions of the present invention, and detailed implementation methods and specific operation processes are given, but the protection scope of the present invention is not limited to the following embodiments.
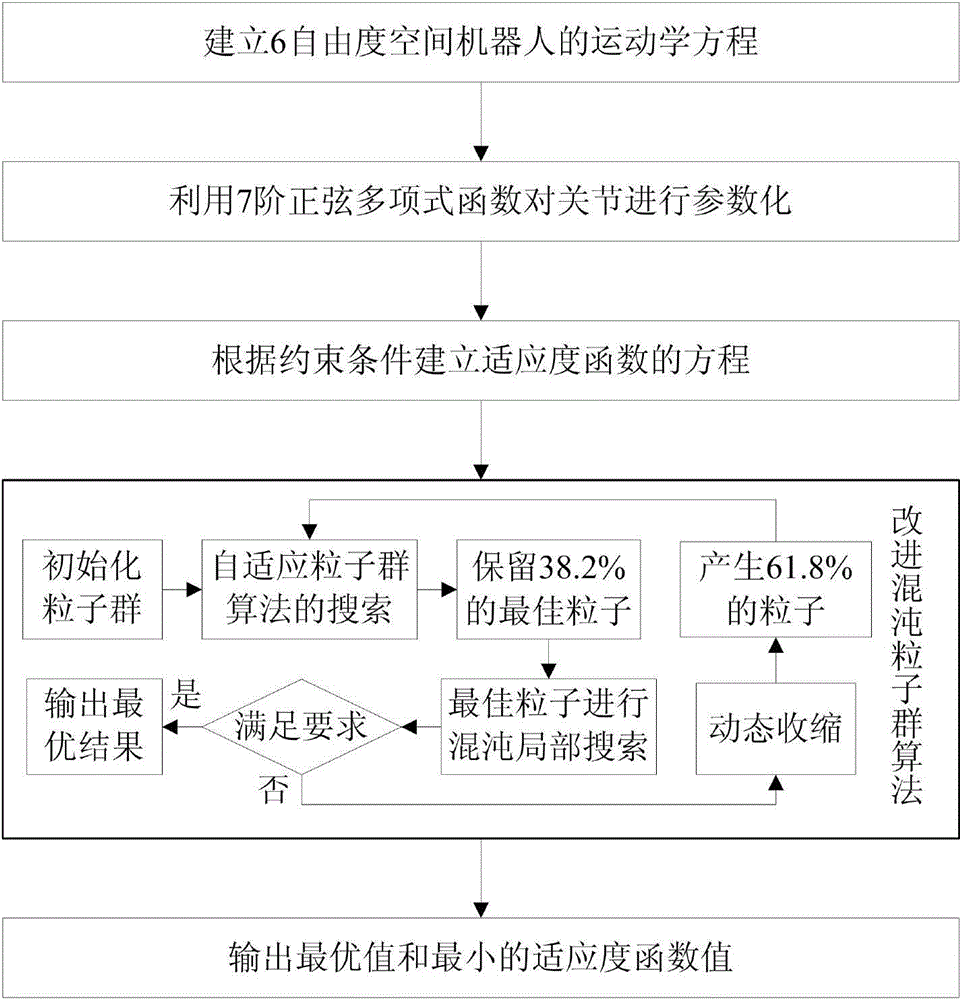
[0040] The specific implementation steps are:
[0041] Step 1: For a free-floating 6-DOF space robot, since there is no external force, the system maintains momentum conservation, and the kinematic equation can be expressed as:
[0042] v e ω e = J b v 0 ω 0 ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More