

Multi-vehicle working air line planning method and system of plant protection unmanned aerial vehicles and spraying working method and system of plant protection unmanned aerial vehicles
A plant protection UAV and UAV technology, applied in control/adjustment system, three-dimensional position/channel control, vehicle position/route/altitude control, etc., can solve the problem of large error in planning route and inability to do multi-machine operations, etc. problem, to achieve the effect of small error, improved operation efficiency, and good flight effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The following describes embodiments of the multi-aircraft operation route planning method and system and spraying operation method and system of the present invention in conjunction with the accompanying drawings.
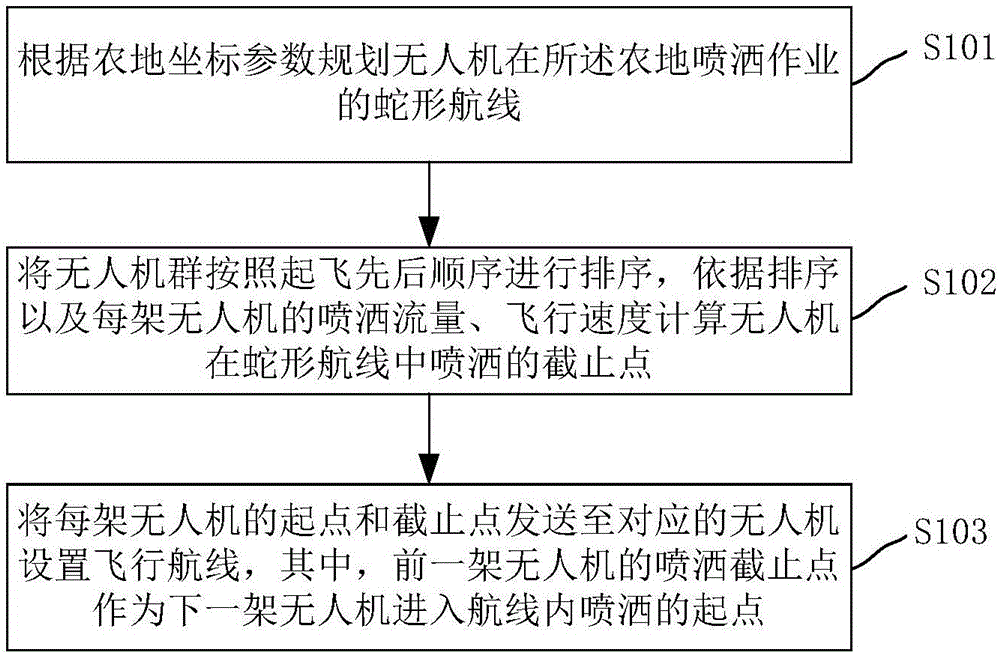
[0036] reference figure 1 As shown, figure 1 It is a flowchart of the multi-aircraft operation route planning method of the plant protection UAV of the present invention, including:
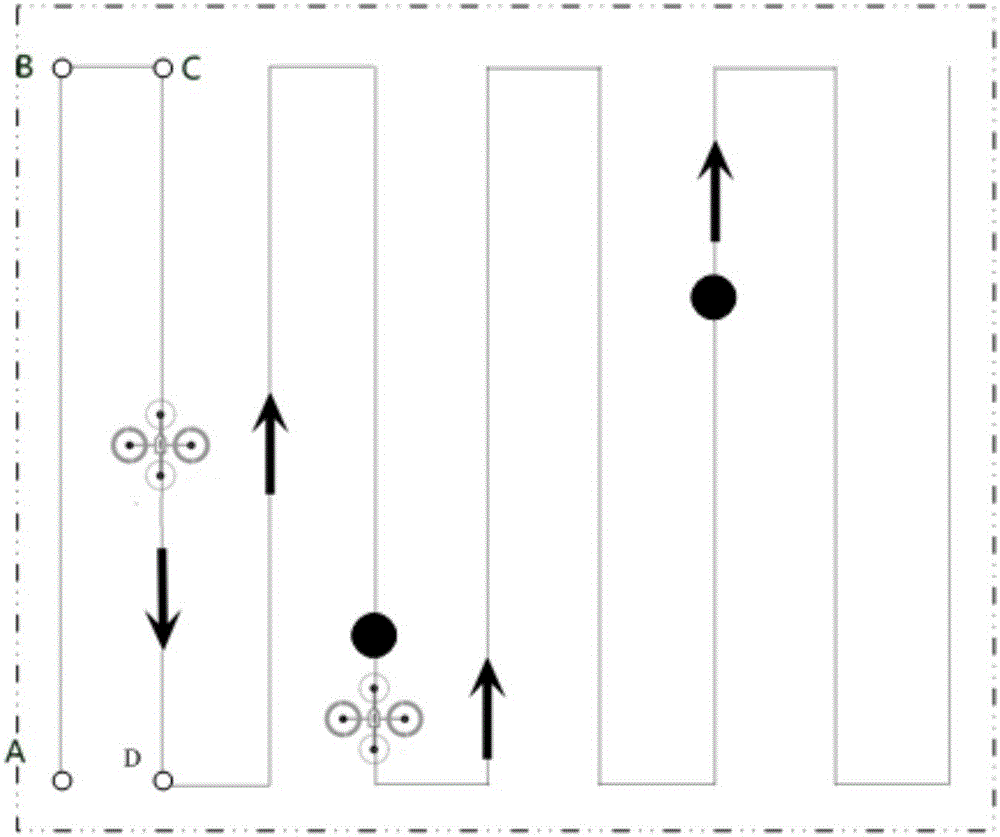
[0037] S101, planning a serpentine course of the drone spraying operation on the farmland according to the farmland coordinate parameters;
[0038] S102: Sort the drone group in the order of take-off, and calculate the spraying cut-off point of the drone in the serpentine course according to the sequence and the spraying flow rate and flight speed of each drone;
[0039] S103: Send the starting point and cut-off point of each drone to the corresponding drone to set the flight route, where the spraying cut-off point of the previous drone is used as the starting point for the next drone t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More