

Hybrid vision servo system and method combining eye-to-hand and eye-in-hand structures
An eye-to-hand, eye-in-hand technology, applied in the field of visual servo control, can solve the problem of single function and achieve the effect of wide application range, large global field of view, and easy promotion and use
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
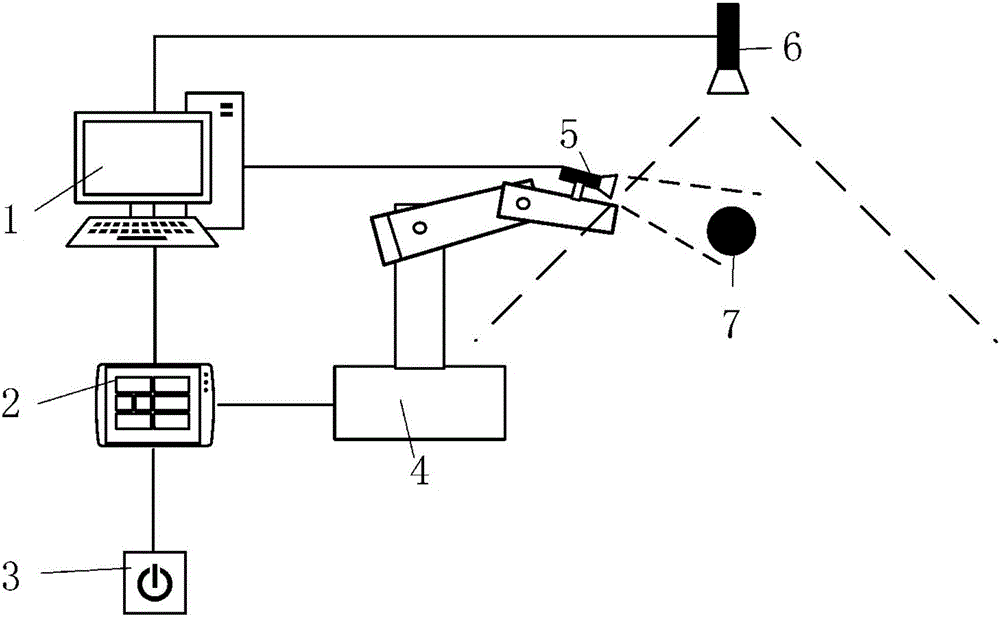
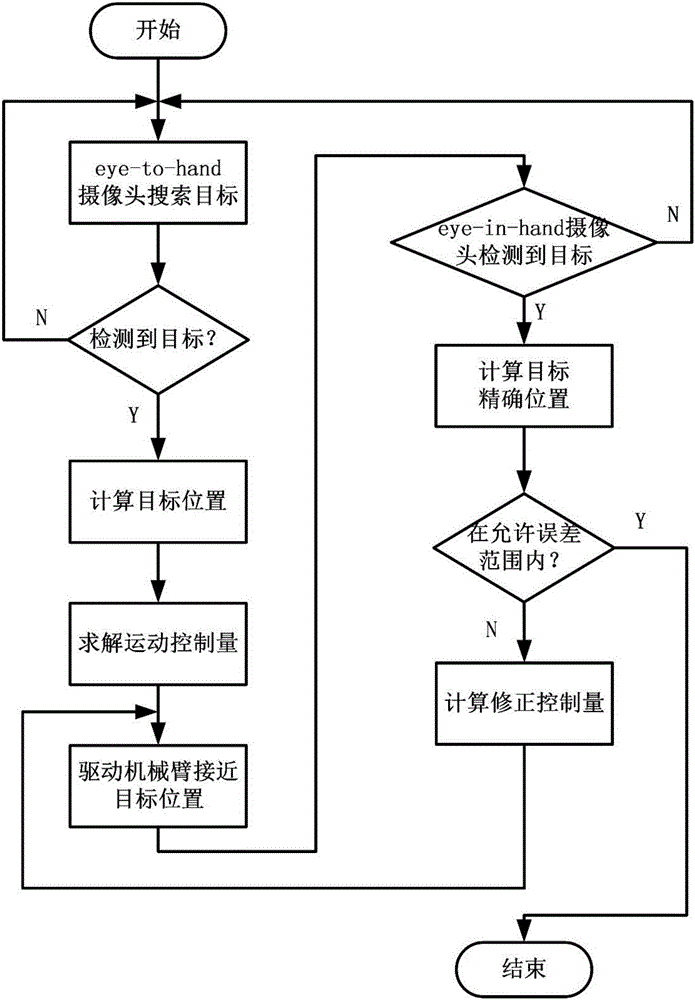
[0037] see figure 2 , the following takes the task of automatic fruit and vegetable picking as an example to describe in detail the control method of the hybrid visual servo system combined with eye-to-hand and eye-in-hand structures of the present invention. In this embodiment, the task of the visual servo system is mainly to use the mature fruit as the target, and use the visual technology to detect, locate and guide the movement of the picking arm, so as to accurately grasp the target fruit. The motion execution module selects a dexterous manipulator with multiple degrees of freedom. The precise positioning and tracking of the hybrid visual servo system based on eye-to-hand and eye-in-hand structures can be achieved through the following five steps:
[0038] (1) Target detection in the global field of view: using image features such as the color and size of ripe fruit as a template, search for a target in the global field of view covered by the eye-to-hand camera 6 to rea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More