Full-autonomous strapdown inertial navigation system based on DSPTMS 320F28335
A strapdown inertial navigation and navigation system technology, applied in the field of fully autonomous strapdown inertial navigation system based on DSPTMS320F28335, can solve the problems of long execution cycle, slow data update, low data processing accuracy, etc., and achieve strong anti-interference and concealment Good performance and low power consumption
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
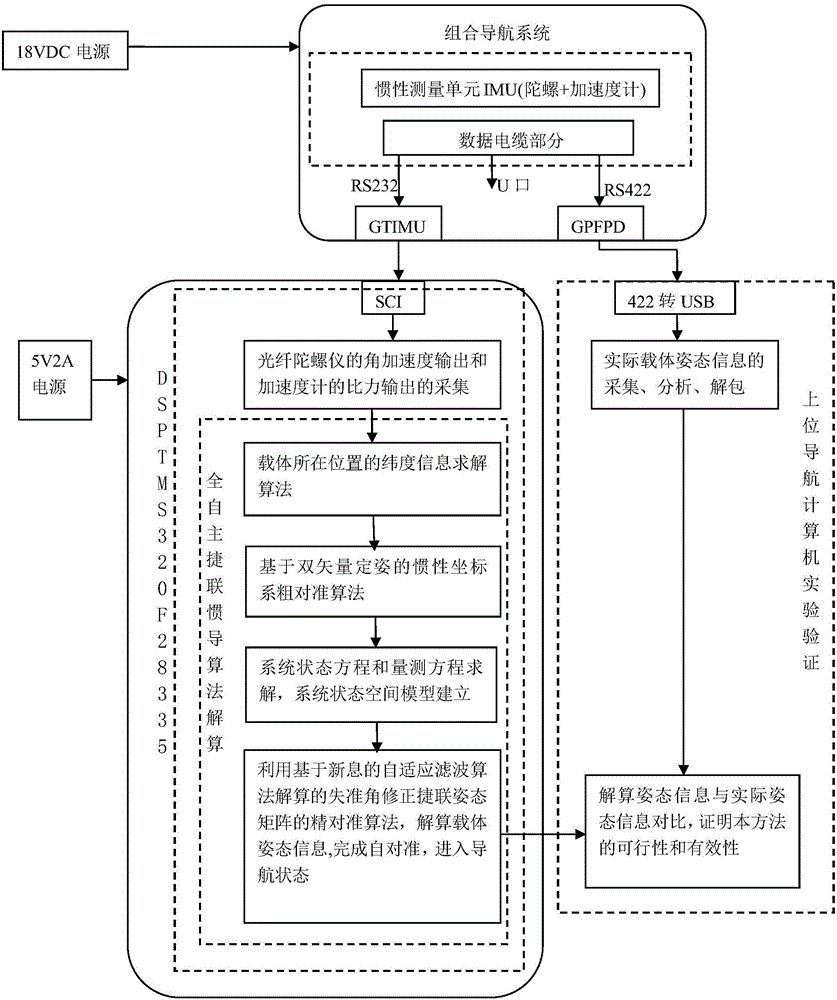
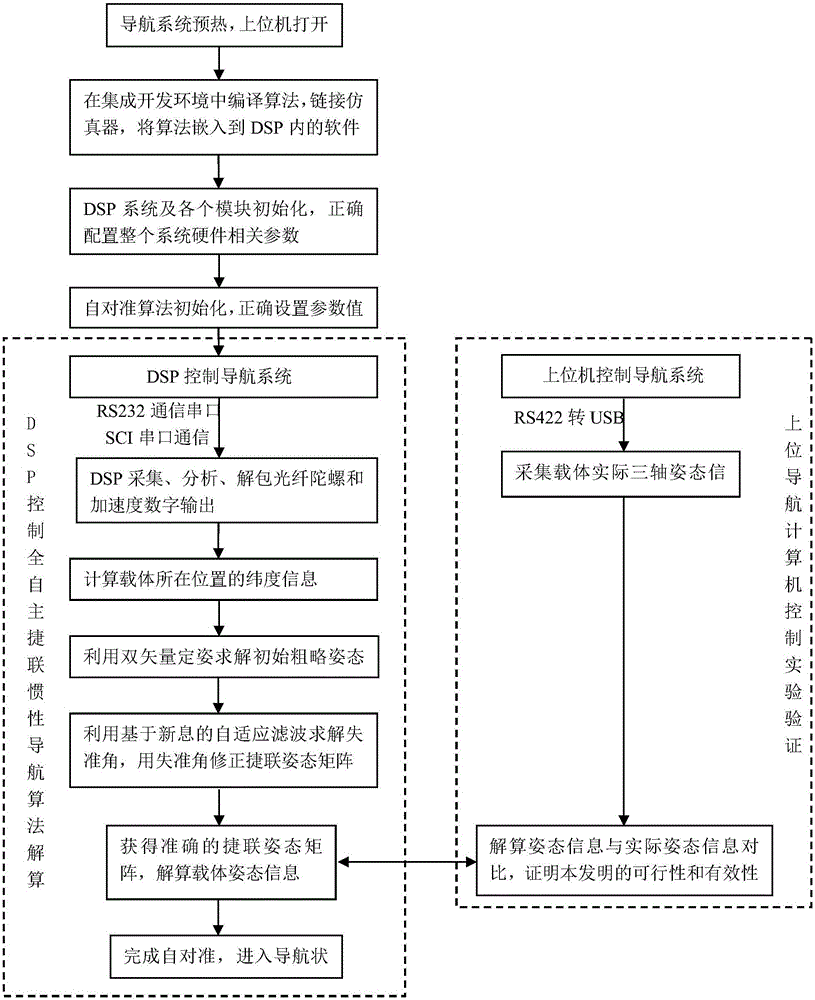
[0033] The present invention is based on 32-bit floating-point type DSPTMS320F28335 control data acquisition and algorithm solution real-time fast full autonomous strapdown inertial navigation system, the following combined with the system flow of the present invention image 3 The specific implementation steps of the present invention are described in detail:
[0034] In the detailed description of the implementation steps below, the coordinate system is defined as follows: the earth coordinate system e system, the origin is selected from the center of the earth, the X axis is located in the equatorial plane, pointing from the center of the earth to the meridian of the point where the carrier is located, and the Z axis is along the direction of the earth's rotation axis, following the earth Rotation and rotation, X-axis, Y-axis and Z-axis constitute the right-handed coordinate system, which rotates with the rotation of the earth; the earth-centered inertial coordinate system i...
PUM
 Login to view more
Login to view more Abstract
Description
Claims
Application Information
 Login to view more
Login to view more - R&D Engineer
- R&D Manager
- IP Professional
- Industry Leading Data Capabilities
- Powerful AI technology
- Patent DNA Extraction
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic.
© 2024 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap