A Vision Detection Method for Planar Rotating Targets
A visual detection and plane rotation technology, applied in the fields of computer vision, pattern recognition and machine learning, can solve problems such as increasing the number of false positive results, reducing detection accuracy, and limiting detection efficiency, so as to reduce computing expenses, improve detection efficiency, and avoid The effect of feature extraction and classification judgment
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
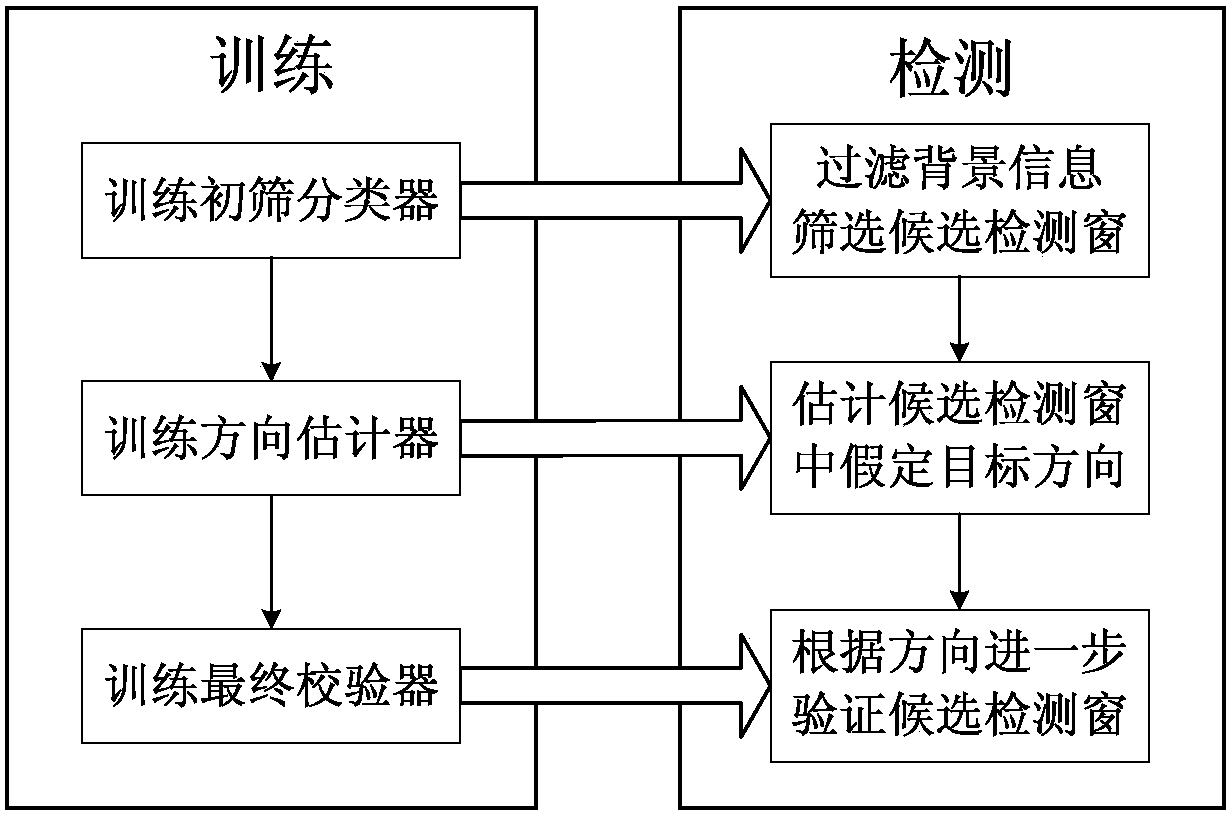
[0039] An embodiment of the present invention provides a visual detection method for planar rotating targets, see figure 1 , the method includes the following steps:
[0040] 101: Randomly rotate the training samples, obtain target sample sets with various orientations, combine the negative sample sets that do not contain the target, obtain the first image features after image feature extraction, use the first image features as input, and pass the machine The learning method performs binary classification training to obtain the primary screening classifier;
[0041] Wherein, the above-mentioned machine learning method may be any machine learning method that can realize classification, such as support vector machine, random forest algorithm, neural network, deep learning, etc., which is not limited in the embodiment of the present invention.
[0042] Further, the above-mentioned steps of binary classification training are well known to those skilled in the art, and are not des...
Embodiment 2
[0053] Combine below Figure 2-Figure 4 The scheme in embodiment 1 is introduced in detail, see the following description for details:
[0054] 201: Train the primary screening classifier;
[0055] In the detection task, the target often only occupies a small part of the picture to be tested, and the detailed multi-directional detection for each position in the picture to be tested will undoubtedly increase unnecessary computing expenses. Therefore, the embodiment of the present invention applies a window preliminary screening link at the beginning of the detection, that is, scans and detects the entire image to be tested without considering the direction, and obtains candidate detection windows for suspected objects.
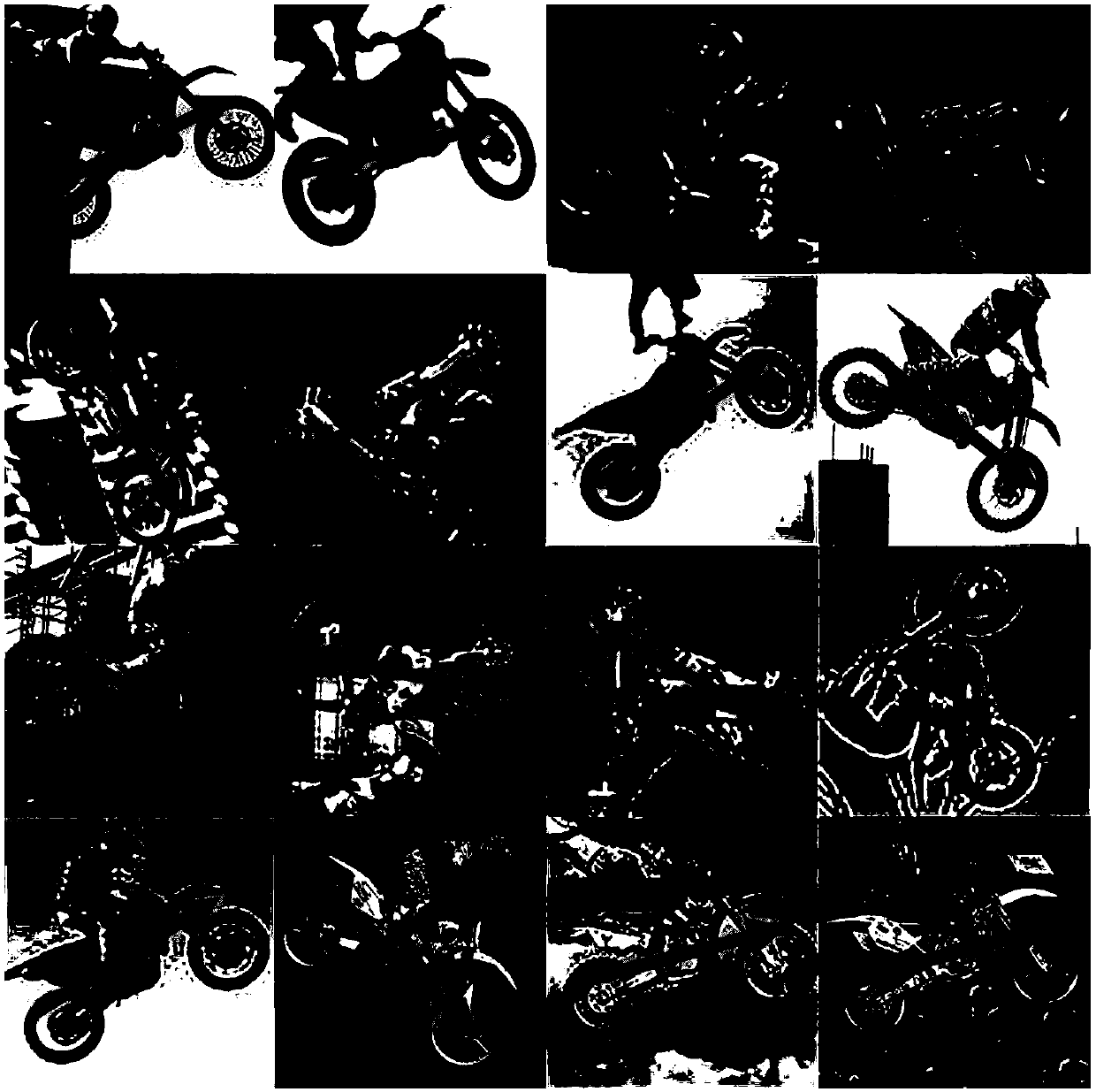
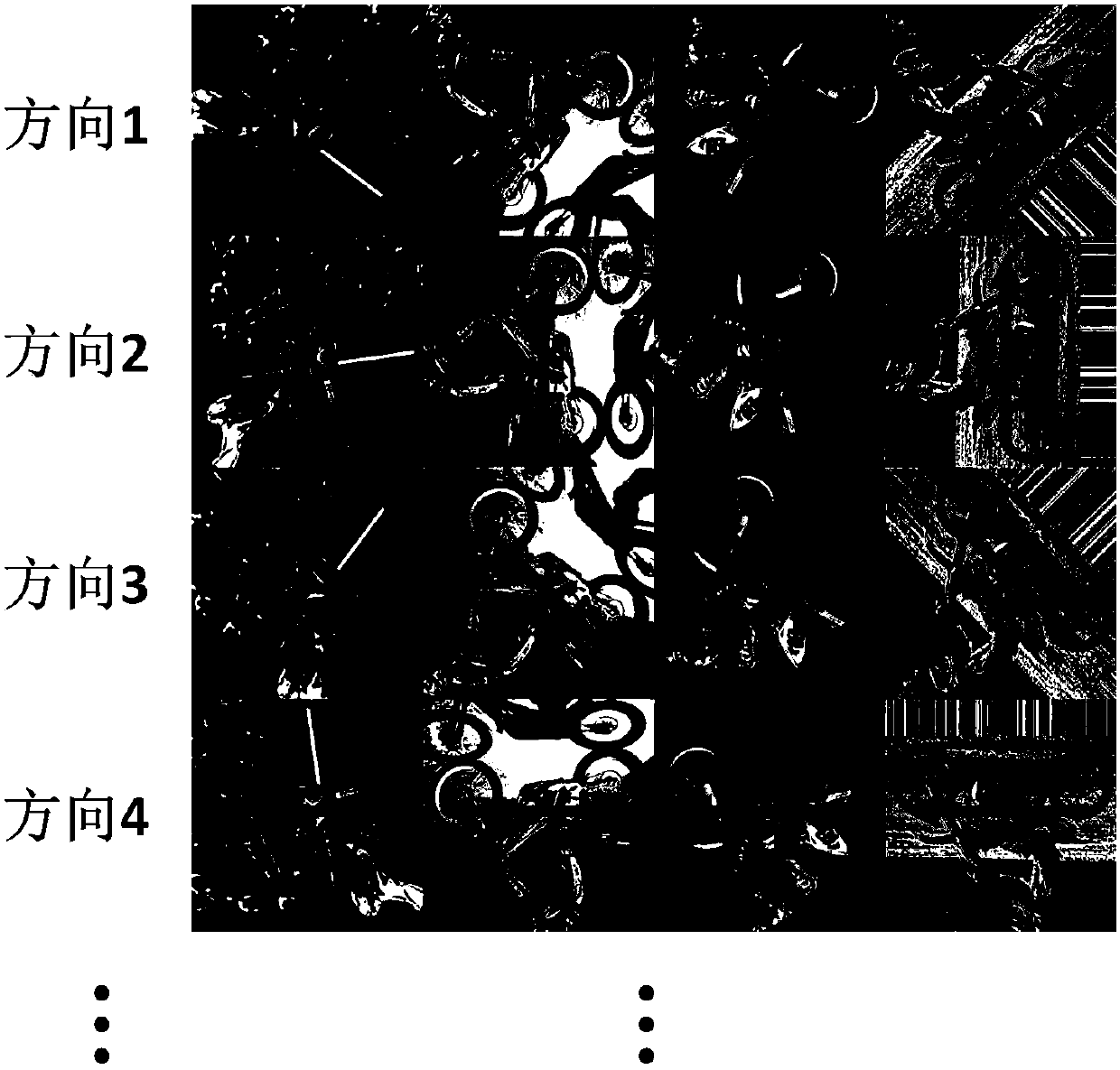
[0056] Before the training starts, it is necessary to randomly rotate the training samples containing the target to obtain a positive sample set containing samples from all directions, such as figure 2 As shown, it illustrates some positive sample pictures use...
Embodiment 3
[0074] Combine below Figure 5 The scheme in embodiment 1 and 2 is carried out feasibility verification, see the following description for details:
[0075] exist Figure 5 In the shown experiments, the embodiment of the present invention uses the histogram of sector-shaped oriented gradients (SRHOG) as the image feature required for detection, and the classification method adopts the random fern algorithm (RFs). The training and test pictures are from the Freestylemotocross public dataset, the purpose is to detect motorcycles with different rotations in various pictures. In the picture to be tested (such as Figure 5 As shown in (a), when performing target detection, according to the above method, firstly, the candidate detection window set in the picture to be tested is obtained through window preliminary screening (such as Figure 5 (b), Figure 5 Each circular area in (b) represents a candidate detection window); then use the direction estimation link to estimate the d...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More - Generate Ideas
- Intellectual Property
- Life Sciences
- Materials
- Tech Scout
- Unparalleled Data Quality
- Higher Quality Content
- 60% Fewer Hallucinations
Browse by: Latest US Patents, China's latest patents, Technical Efficacy Thesaurus, Application Domain, Technology Topic, Popular Technical Reports.
© 2025 PatSnap. All rights reserved.Legal|Privacy policy|Modern Slavery Act Transparency Statement|Sitemap|About US| Contact US: help@patsnap.com