

Natural language-based robot deep interacting and reasoning method and device
A technology of natural language and reasoning methods, applied in the field of deep interaction and reasoning of robots, can solve problems such as the inability to analyze users, lack of autonomy, and reasoning mechanisms without analytical capabilities, so as to improve the recognition rate, reduce the search range, and improve the market The effect of application prospect and development potential
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
example 1
[0060] S31: Segment the text obtained in S1 using a tokenizer. Example 1: The text converted by the user input voice is: "grab an apple", after word segmentation by the tokenizer, the result is: "grab / one / apple / ".
example 2
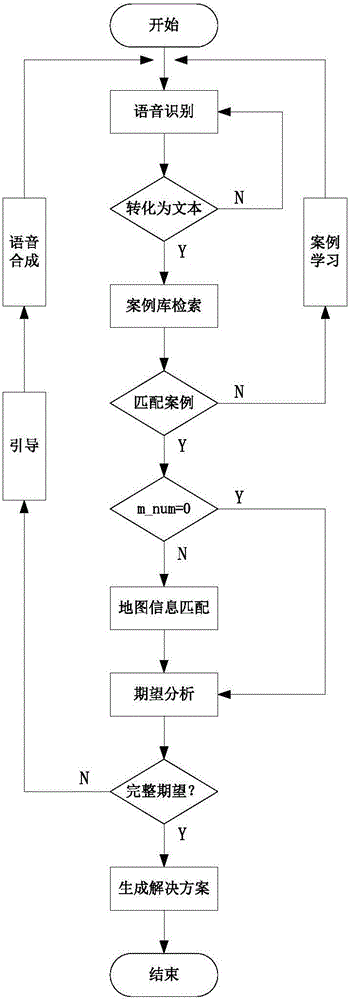
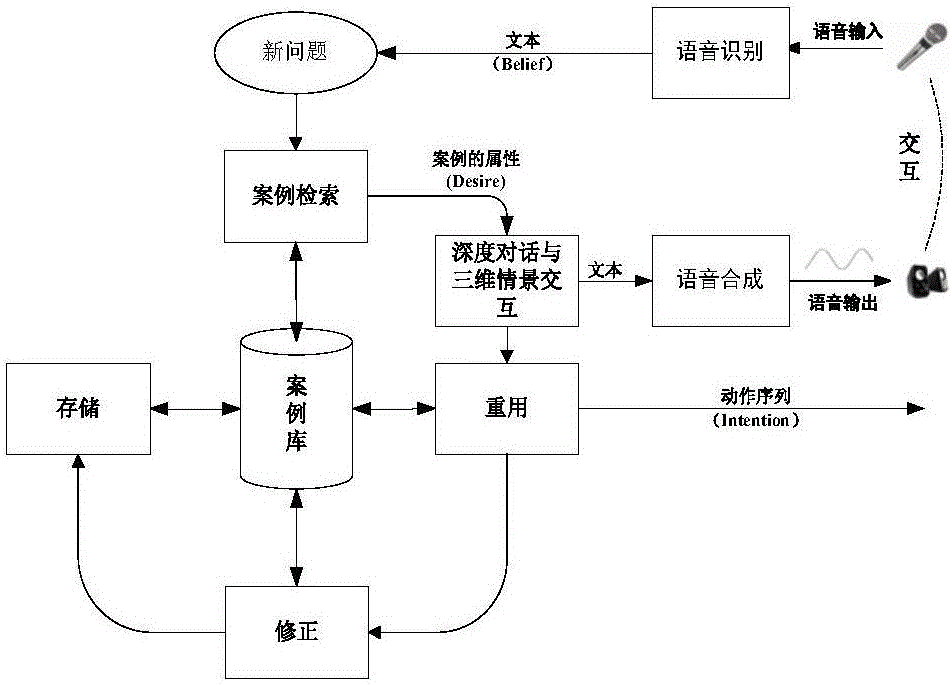
[0061] S32: Match each word after word segmentation with the case base, if no similar case is retrieved, create a new case; if similar case is retrieved, return similar case:, and calculate the number of initial case attributes. Example 2: Case: "grab an apple", the initial attributes of the case are: object quantity and object name, then the initial case attribute quantity value is 2. When the number of initial case attributes is greater than 0, map matching is performed; when the number of initial case attributes is equal to 0, the input is invalid and the robot actively guides.
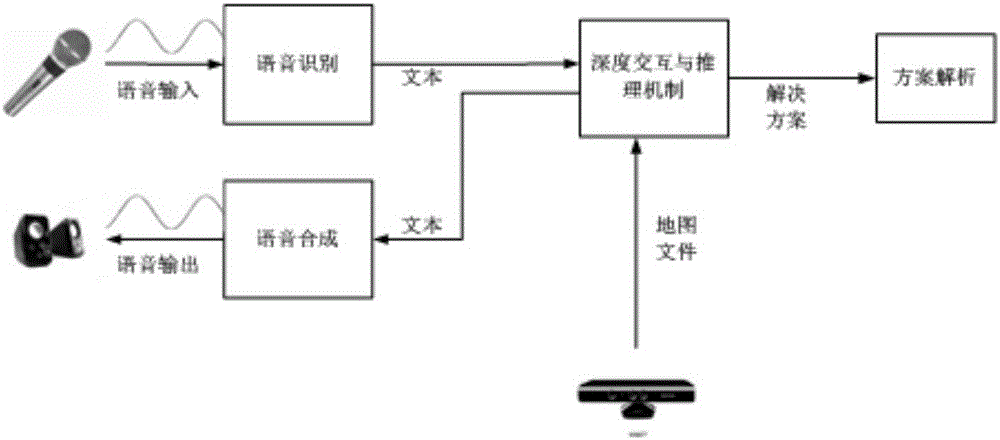
[0062] S4: In-depth dialogue and 3D scene interaction, the specific process is as follows Figure 4 Shown:
[0063] S41: map matching;
[0064] S411: The system needs to obtain high-quality semantic map information of the working environment through 3D visual environment perception. This design scheme uses Kinect to extract 3D point cloud images and establishes a CSHOT object model for feature m...
example 3
[0070] Example 3: There is a big red apple in the map file. The user says to the robot: "grab an apple". The corresponding situation for map matching is: the number of objects in the scene is equal to the number required by the user, but when performing the expected analysis, the objects If the attribute value of the placed destination name is empty, the expectation is incomplete, and the method in S43 needs to be used for user guidance.
[0071] S43: User guidance
[0072] When the expectations obtained by user expectations analysis are incomplete, user guidance should be carried out. Each attribute node in the case storage has a corresponding dialogue generation function, and the collection of these dialogue generation functions constitutes the bootstrap library. In example 3, the expectation is incomplete. At this time, when searching the guide library, the robot will ask the user: "Which basket do you want to put in" according to the default attributes, and then complete ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More