

Novel exoskeleton finger rehabilitation robot and working method thereof
A rehabilitation robot and exoskeleton technology, applied in the field of robotics, can solve problems such as patient injury, robot misoperation, and transportation difficulties, and achieve the effects of preventing secondary injuries, reducing self-weight, and ensuring rigidity requirements
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment
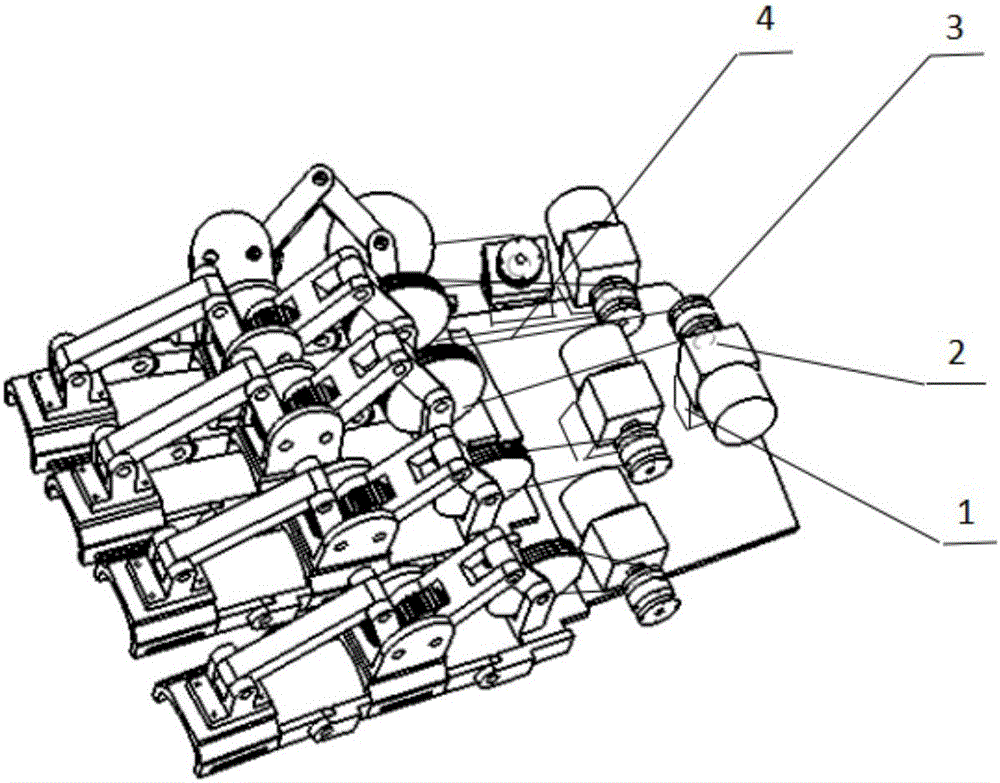
[0032] Embodiment: a kind of novel exoskeleton finger rehabilitation robot (see figure 1 ), is characterized in that it includes a control unit, a motor drive unit, a transmission unit and an execution unit; wherein, the input terminal of the control unit receives the bending signal generated by the bending sensor attached to the finger of the healthy side of the patient, and its output terminal is connected with the motor The input end of the drive unit is connected; the input end of the transmission unit is connected to the output end of the motor drive unit, and its output end is connected to the input end of the execution unit; the output end of the execution unit is in contact with the affected finger of the patient. Force the finger on the affected side of the patient to move.
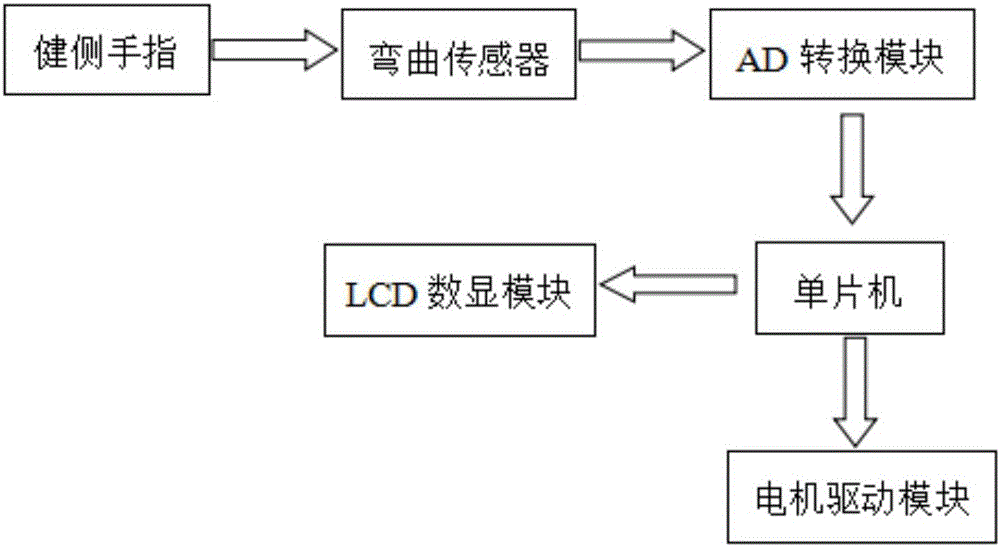
[0033] The control unit (see figure 2) includes a bending sensor, an AD conversion module, a single-chip microcomputer, an LCD digital display module, and a motor drive module; wherein, the inp...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More