Navigation positioning device and method for transcranial magnetic stimulator
A transcranial magnetic stimulation, navigation and positioning technology, applied in the field of medical assistance, can solve the problems of no real-time display of induced electric field distribution, limit the use of optical positioning systems, increase stimulation intensity, etc., achieve intuitive and convenient operation, solve automatic navigation and repetitive Targeting, addressing the effects of precise targeting and repeated targeting
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
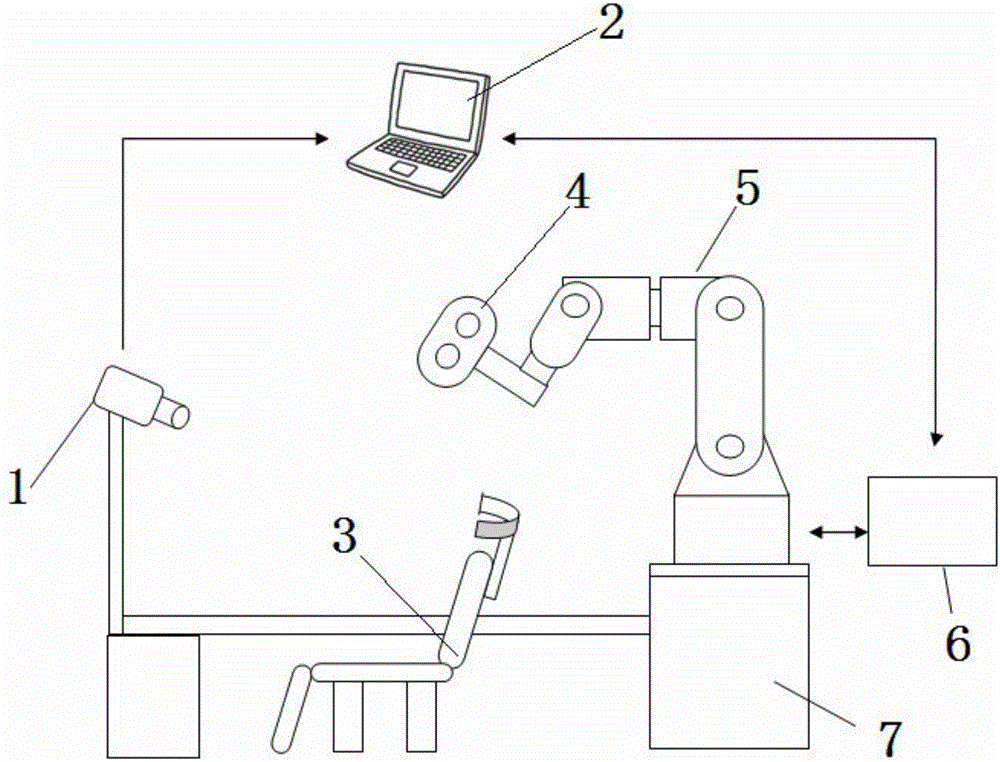
[0027] This embodiment provides a navigation and positioning device for a transcranial magnetic stimulator, which is characterized in that: the navigation and positioning device for a transcranial magnetic stimulator includes a visual positioning module 1, a computer 2, a seat 3, a transcranial magnetic Stimulator coil 4, robotic arm 5, robotic arm controller 6, base 7;
[0028] Wherein: the visual positioning module 1 is connected with the computer 2, the seat 3 is positioned between the base 7 and the visual positioning module 1 through the slideway, the transcranial magnetic stimulator coil 4 is installed on the front end of the mechanical arm 5, and the mechanical arm 5 is installed on the base On the seat 7, the mechanical arm 5 is connected with the mechanical arm controller 6; the mechanical arm controller 6 is connected with the computer 2.
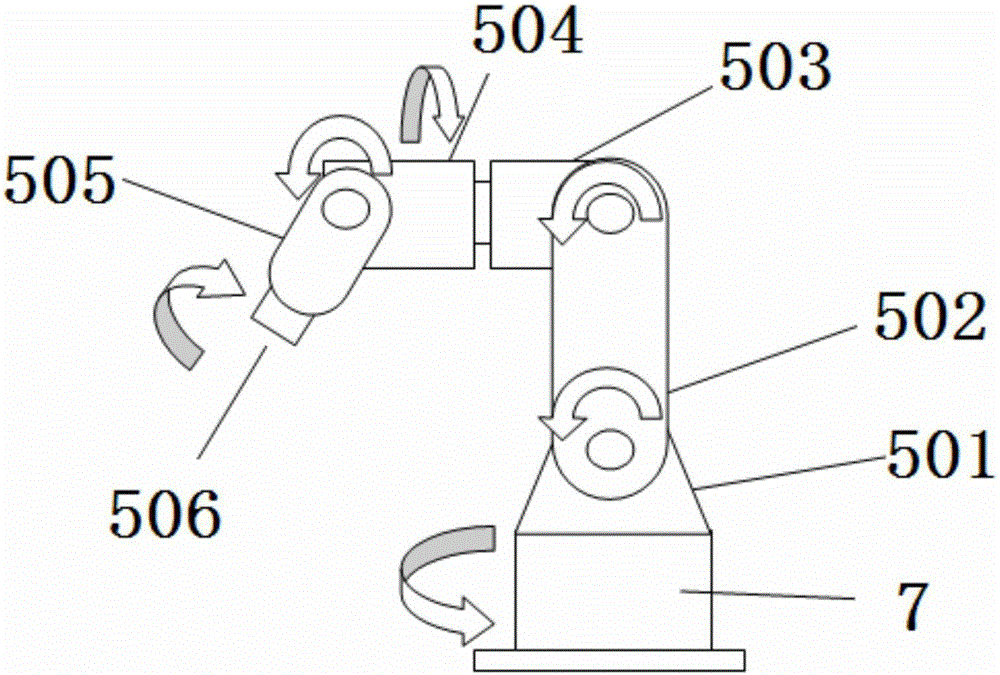
[0029] The mechanical arm 5 includes an I axis 501, an I axis 501, an II axis 502, a III axis 503, an IV axis 504, a V axis 505,...
Embodiment 2
[0043] This embodiment provides a navigation and positioning device for a transcranial magnetic stimulator, which is characterized in that: the navigation and positioning device for a transcranial magnetic stimulator includes a visual positioning module 1, a computer 2, a seat 3, a transcranial magnetic Stimulator coil 4, robotic arm 5, robotic arm controller 6, base 7;
[0044] Wherein: the visual positioning module 1 is connected with the computer 2, the seat 3 is positioned between the base 7 and the visual positioning module 1 through the slideway, the transcranial magnetic stimulator coil 4 is installed on the front end of the mechanical arm 5, and the mechanical arm 5 is installed on the base On the seat 7, the mechanical arm 5 is connected with the mechanical arm controller 6; the mechanical arm controller 6 is connected with the computer 2.
[0045] The mechanical arm 5 includes an I axis 501, an I axis 501, an II axis 502, a III axis 503, an IV axis 504, a V axis 505,...
Embodiment 3
[0058] This embodiment provides a navigation and positioning device for a transcranial magnetic stimulator, which is characterized in that: the navigation and positioning device for a transcranial magnetic stimulator includes a visual positioning module 1, a computer 2, a seat 3, a transcranial magnetic Stimulator coil 4, robotic arm 5, robotic arm controller 6, base 7;
[0059] Wherein: the visual positioning module 1 is connected with the computer 2, the seat 3 is positioned between the base 7 and the visual positioning module 1 through the slideway, the transcranial magnetic stimulator coil 4 is installed on the front end of the mechanical arm 5, and the mechanical arm 5 is installed on the base On the seat 7, the mechanical arm 5 is connected with the mechanical arm controller 6; the mechanical arm controller 6 is connected with the computer 2.
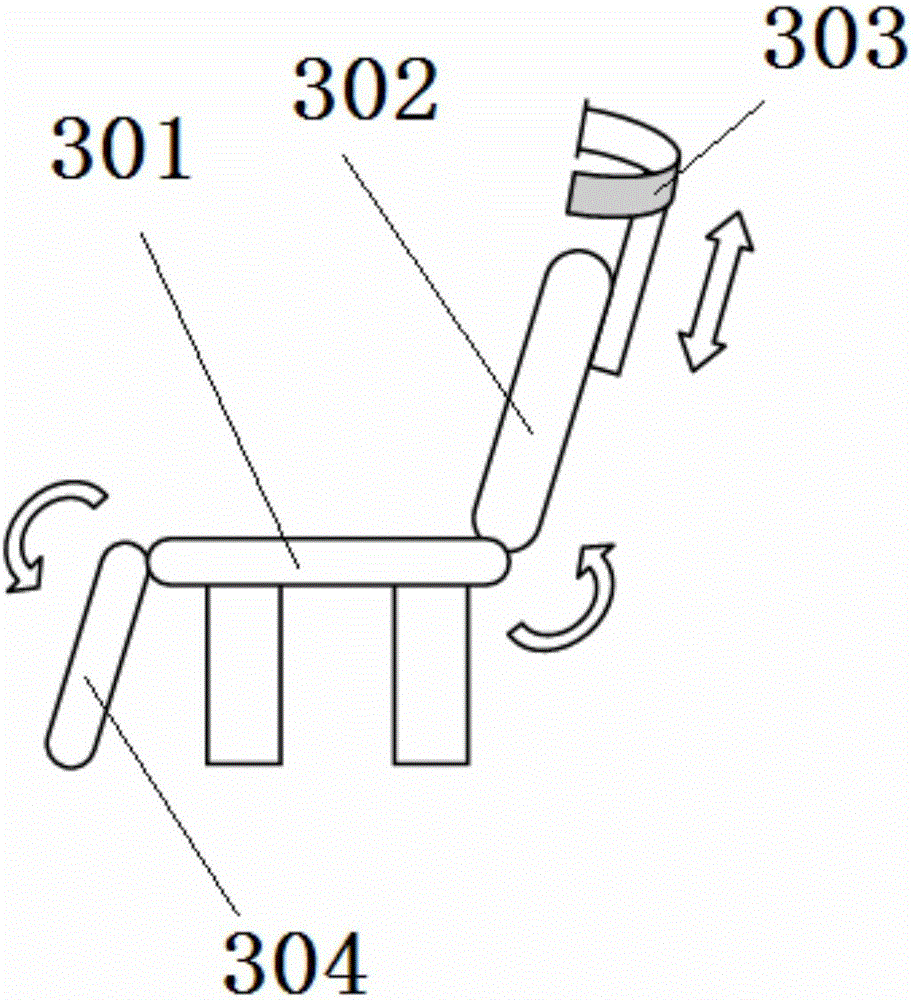
[0060] The seat 3 includes a load-bearing part 301, a backrest 302, a head rest 303, and a leg rest 304; wherein: the bottom loa...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More