

Inertial navigation origin positioning method and system based on UWB ranging
An origin positioning and origin technology, which is applied in the field of inertial navigation origin positioning method and system based on UWB ranging, can solve the problems of not involving initialization origin and direction, poor flexibility and mobility, untrustworthy position information, etc., to eliminate disadvantages Influence, avoid initialization deviation, and the effect of flexible layout
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The present invention will be further described below in conjunction with the accompanying drawings and specific preferred embodiments, but the protection scope of the present invention is not limited thereby.
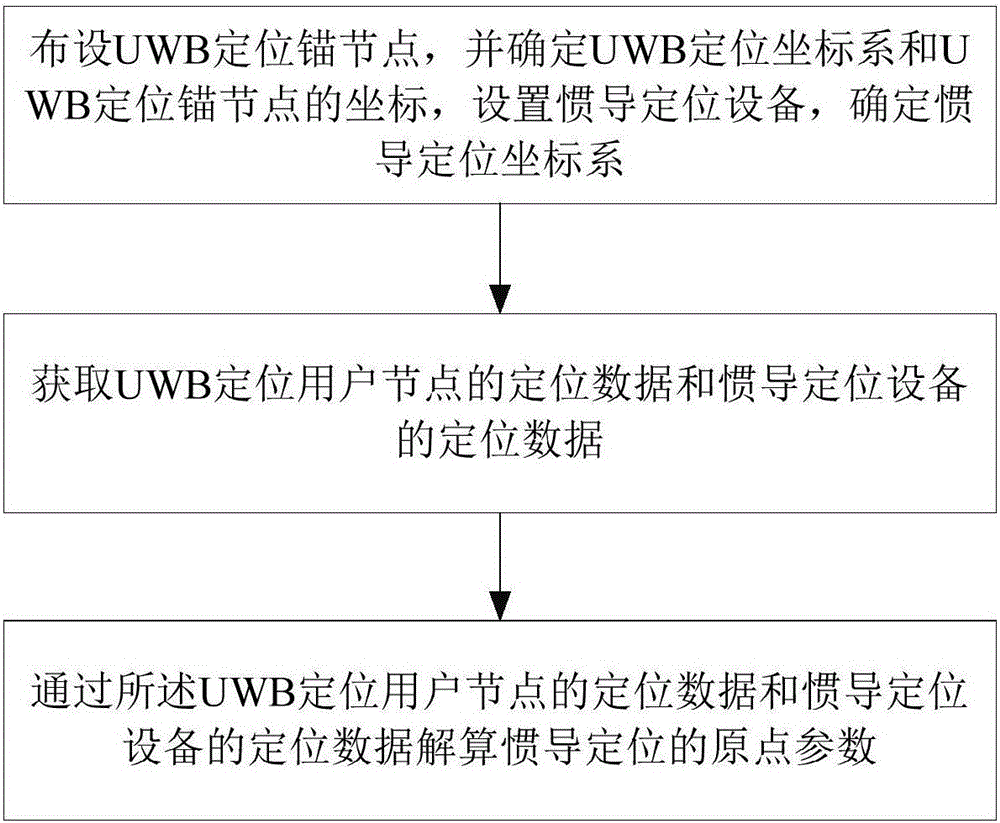
[0033] Such as figure 1 As shown, this embodiment is based on the inertial navigation origin positioning method of UWB ranging, and the same target is positioned by the UWB positioning user node and the inertial navigation positioning device, including the following steps: S1. Layout the UWB positioning anchor node, and determine the UWB positioning coordinates coordinate system and UWB positioning anchor node, set the inertial navigation positioning equipment, and determine the inertial navigation positioning coordinate system; S2. Obtain the positioning data of the UWB positioning user node and the positioning data of the inertial navigation positioning equipment; S3. Position the user node through UWB Data and the positioning data of the inertial navigation p...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More