Obstacle avoiding communication system for robot or unmanned plane
A technology of unmanned aerial vehicles and robots, applied in two-dimensional position/lane control, three-dimensional position/lane control, etc., can solve the problems of system weight, volume, power consumption increase, system complexity, etc., and achieve stability and accuracy Excellent, simple system structure, cost reduction effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0031] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
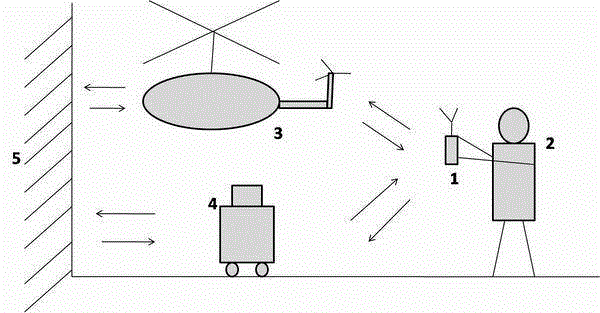
[0032] Among the functions of automatic obstacle avoidance / location / navigation, automatic obstacle avoidance is the most basic function to automatically respond to the surrounding environment, while automatic positioning and navigation is a more advanced function with higher autonomy. For example, in the automatic obstacle avoidance function, if the robot (or UAV) detects the existence of an obstacle, it will stop and wait or go around the obstacle; in the automatic positioning function, the robot (or UAV) will pass the measurement From detecting the surrounding area environment, obtaining the area map, and determining its position in the area; and the automatic navigation function, often through multiple detections and positioning, realizes automatic movement from a point on the area map to the target location, and Automatically avoid obstacle...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More