

A trajectory planning method for space mobile multi-arm robot
A technology of space movement and movement trajectory, applied in the direction of manipulators, program-controlled manipulators, manufacturing tools, etc., to achieve the effect of simple moving process, ensuring safety, and simplifying the calculation process
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
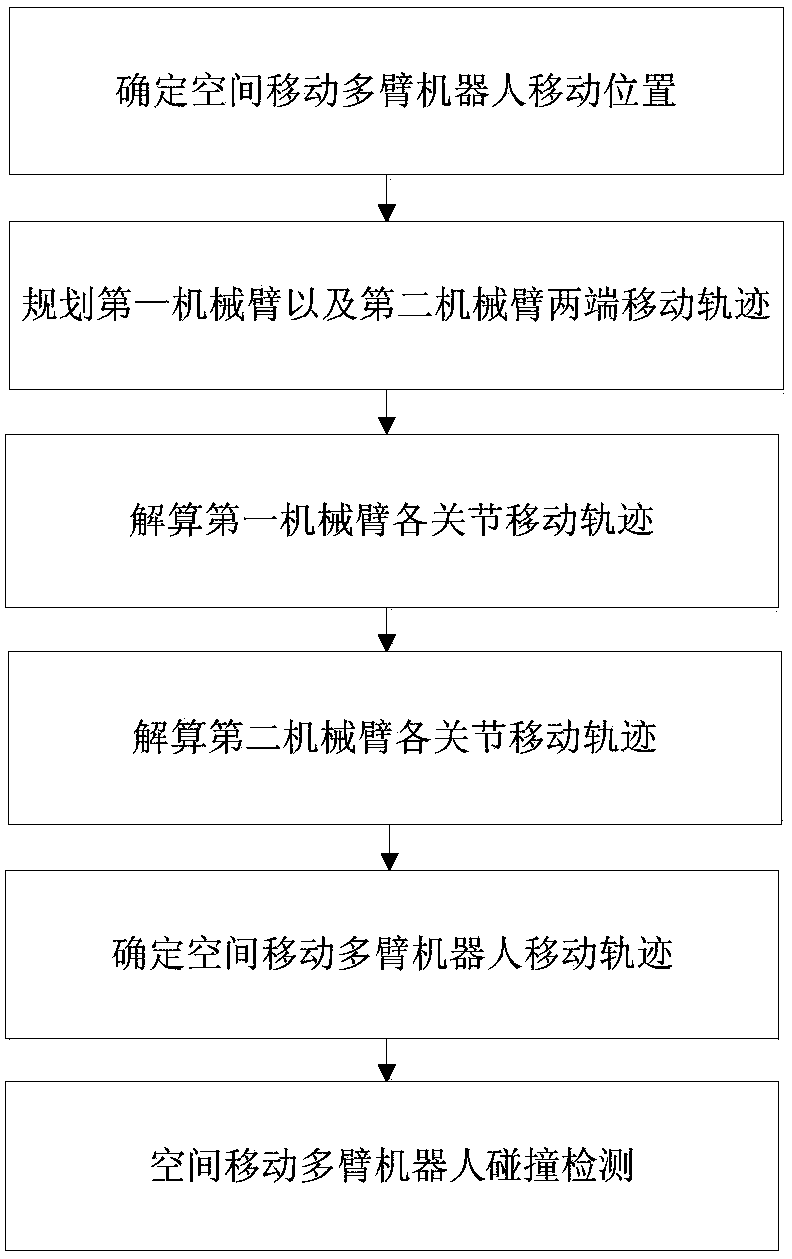
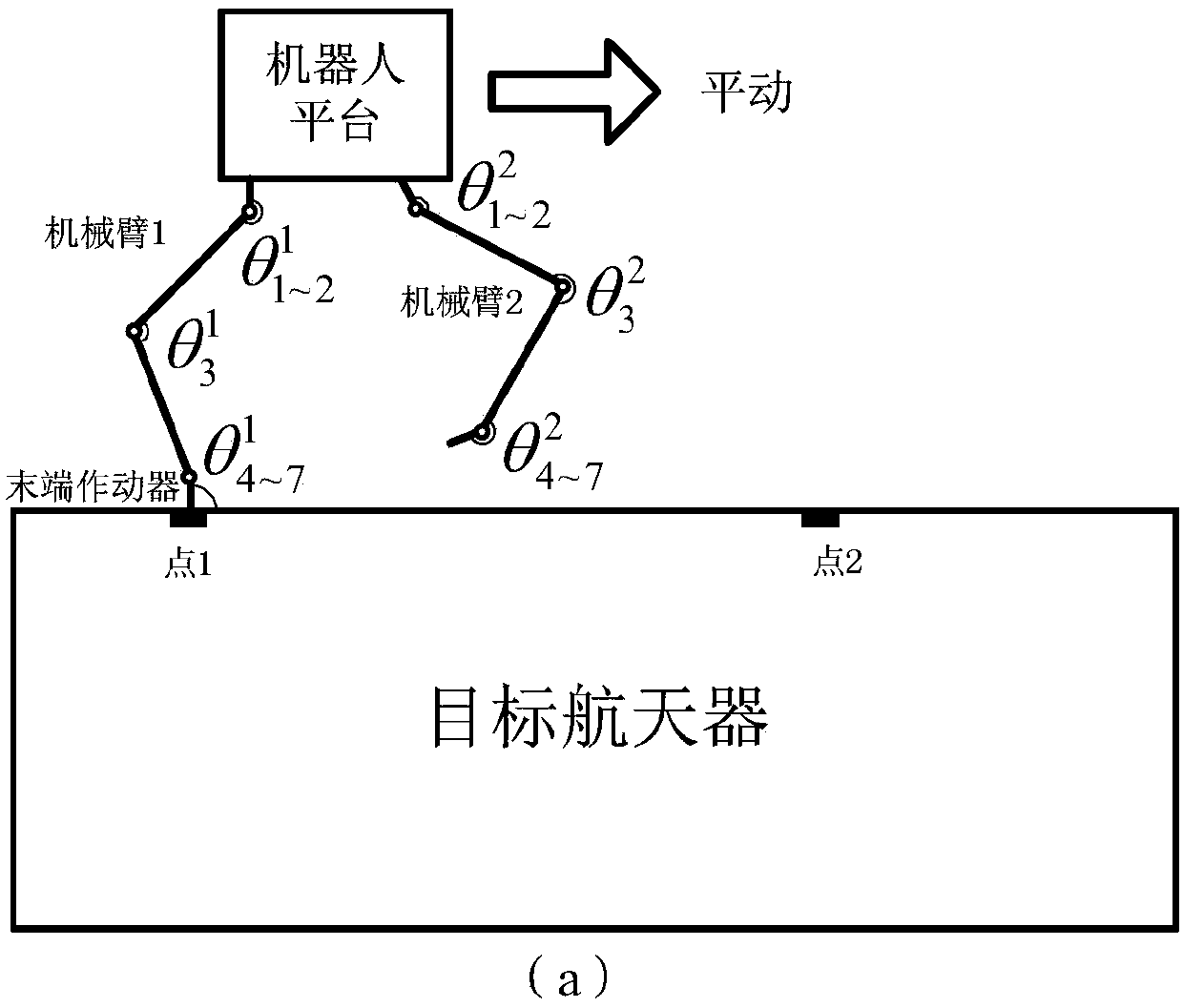
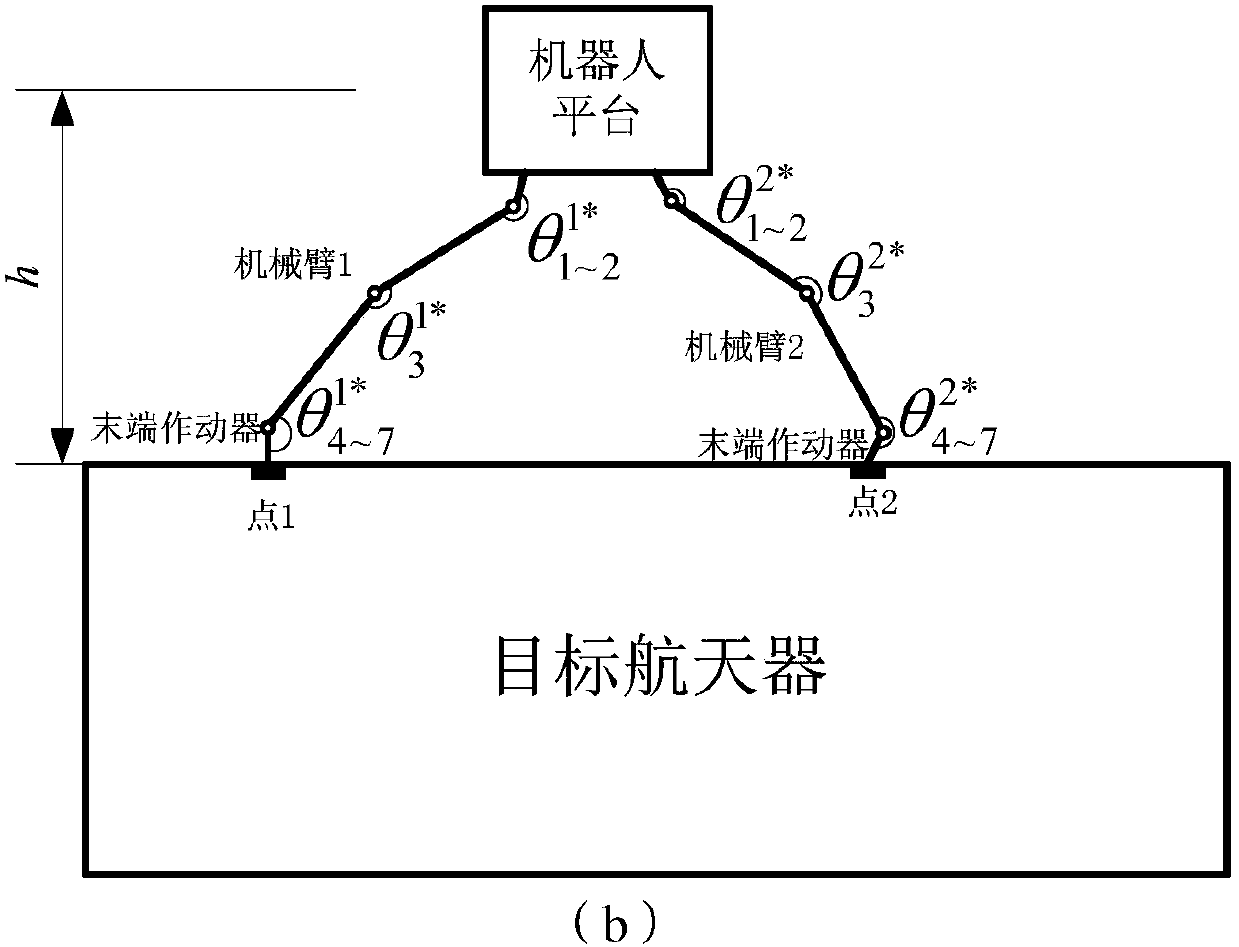
[0032] The invention provides a moving track planning method for a space mobile multi-arm robot, which can effectively plan the trajectory of the space mobile multi-arm robot on the surface of a large spacecraft, and ensure the safety of the space mobile multi-arm robot in the orbital operation process In addition, the trajectory planning method proposed by the present invention can be applied to the task design of all space mobile multi-arm robots in the future. The proposed scheme is feasible and easy to promote; the collision detection proposed by the present invention is also applicable to any Therefore, it has a wide range of applications, has great market competitiveness and first-mover advantages, fills the gaps in practical solutions and theoretical research content in related fields, and has strong engineering practical and theoretical guiding significance.
[0033] Taking a certain moving step as an example, the specific steps of the method for planning the moving tra...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More