

A multi-track planning method for swarm unmanned aerial vehicles based on two-dimensional grid division
A technology for track planning and unmanned aerial vehicles, which is applied in the field of multi-track planning of swarm unmanned aerial vehicles based on two-dimensional grid division, and can solve the problems of small computational load and unsuitability for swarm combat systems, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described below in conjunction with accompanying drawing:
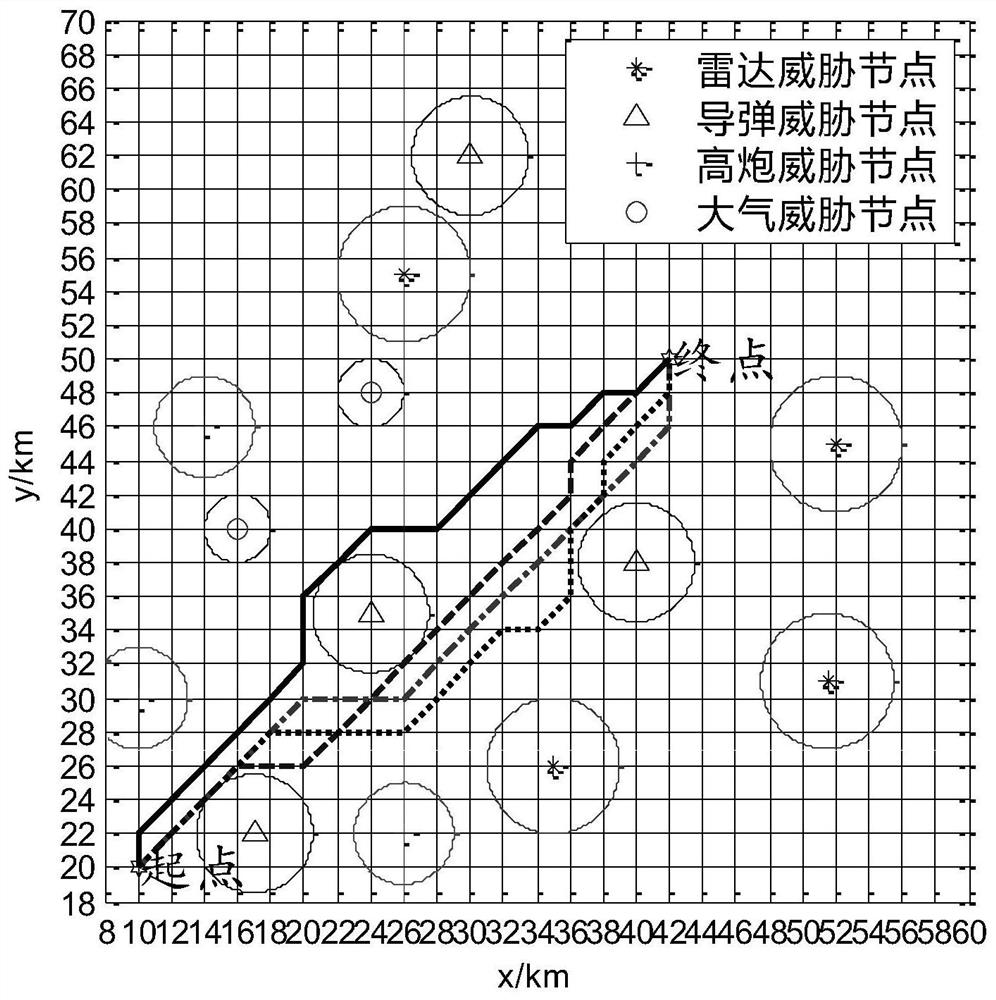
[0046] The invention relates to a multi-track planning method for cluster UAVs based on two-dimensional grid division. In order to solve the problem of track planning under the combat situation of UAV clusters, the method proposes a method for obtaining multiple optional paths. A trajectory planning method for swarm unmanned aerial vehicles.
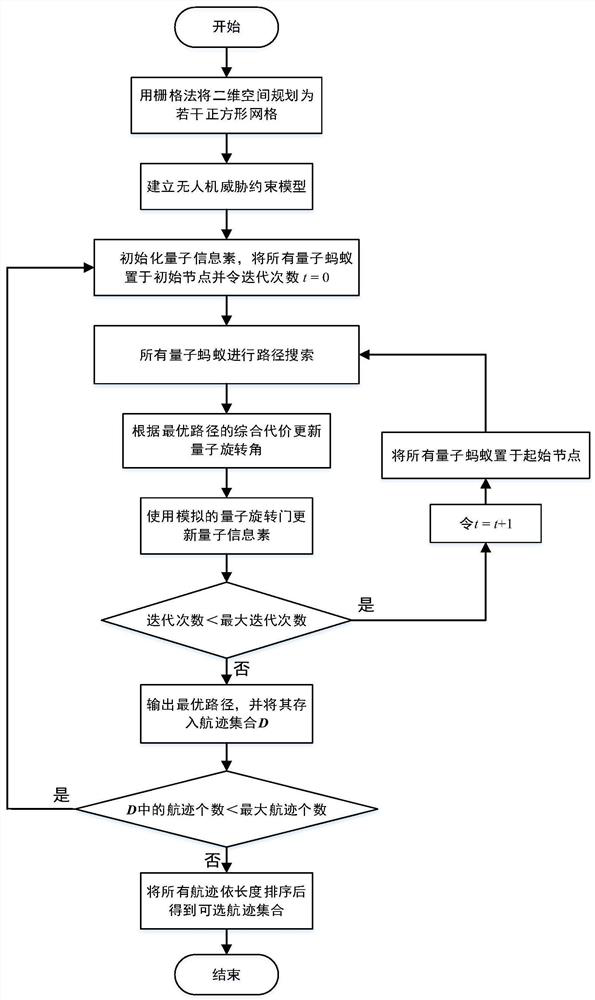
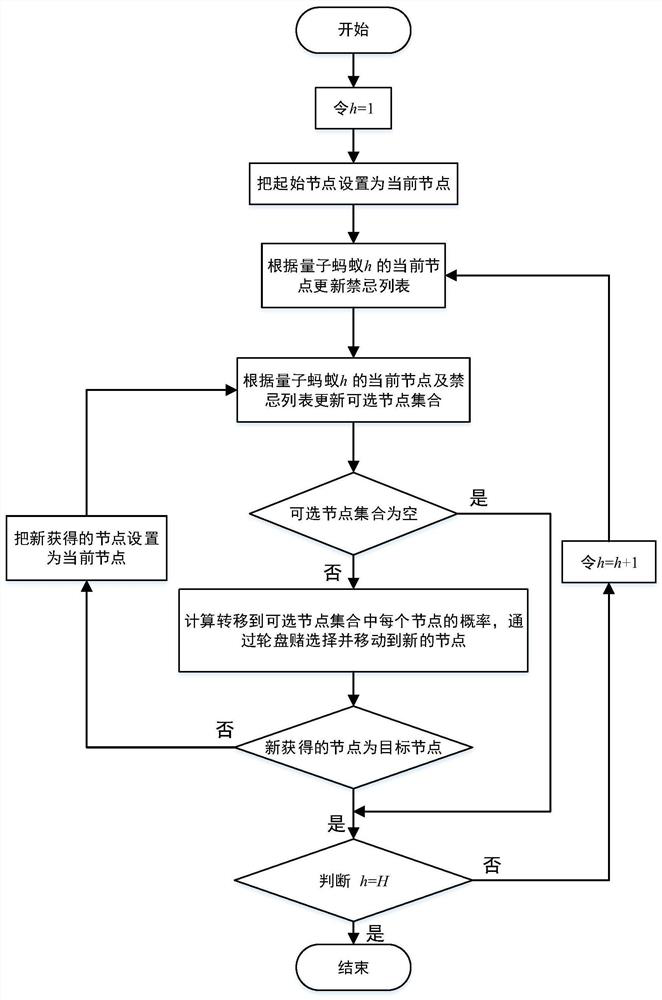
[0047] Such as figure 1 and 2 Shown, the detailed flow process of the method proposed in the present invention is as follows:
[0048] Step 1. Use the grid method to plan the two-dimensional space into several square grids. Let the abscissa range of the two-dimensional space be [x min ,x max ], the ordinate range is [y min ,y max ], the grid size is G, then each column has h=(y max -y min ) / G grids, each row has v=(x max -x min ) / G grids, the total number of grids is n=h·v. Take the grid node in the lower left corner of ea...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More