

Track planning method for line target-oriented UAV reconnaissance
A track planning, UAV technology, applied in the field of UAV reconnaissance, to achieve the effect of simple task track, fast effectiveness, and fast algorithm convergence speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
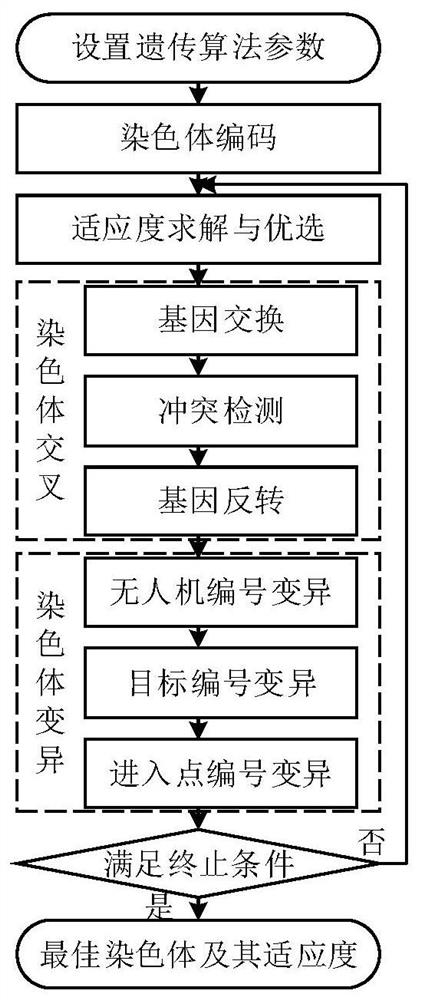
[0076] The present invention will be further explained below in conjunction with the accompanying drawings. UAV reconnaissance track planning method for broadening targets, flow chart reference figure 1 . Include the following steps:
[0077] Step 1: Build a track planning model for multi-drone complaints reconnaissance multi-line target tasks;
[0078] The amount of line target required for M frame drone, n line target, the number of wires required for the Iman drone is N i .
[0079] (101) Calculate the distance L of the first line target of the first line of the first line allocated. i1 :
[0080] L i1 = D (x i Y i ), (x i11 Y i11 )) (1)
[0081] Among them, coordinate (X i Y i Represents the position of the Iman, coordinate (X i11 Y i11 ) Indicates the entry point position of the first line target assigned to the allocated first line; D (A, B) represents the geometric distance between the point A and Point B;
[0082] (102) Calculate the target length of the JU 1ij :
[0083] ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More