

A Vehicle Obstacle Avoidance Trajectory Planning Method Based on Gaussian Pseudospectral Method
A Gaussian pseudospectral method and trajectory planning technology, applied in the field of vehicle obstacle avoidance trajectory planning, can solve problems such as uneven paths, excessive changes in path curvature, and inability to learn flexibility, etc., to achieve the effect of compensating for complex calculations and fast solution speed
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] In recent years, numerical optimization calculation methods have been widely used. It can not only consider multi-objective trajectory optimization, but also add dynamic constraints of the vehicle state to ensure the feasibility and optimality of the optimized trajectory. As a branch of numerical optimization methods, Gaussian pseudospectral method has developed rapidly in recent years and is widely used in complex optimal control problems.
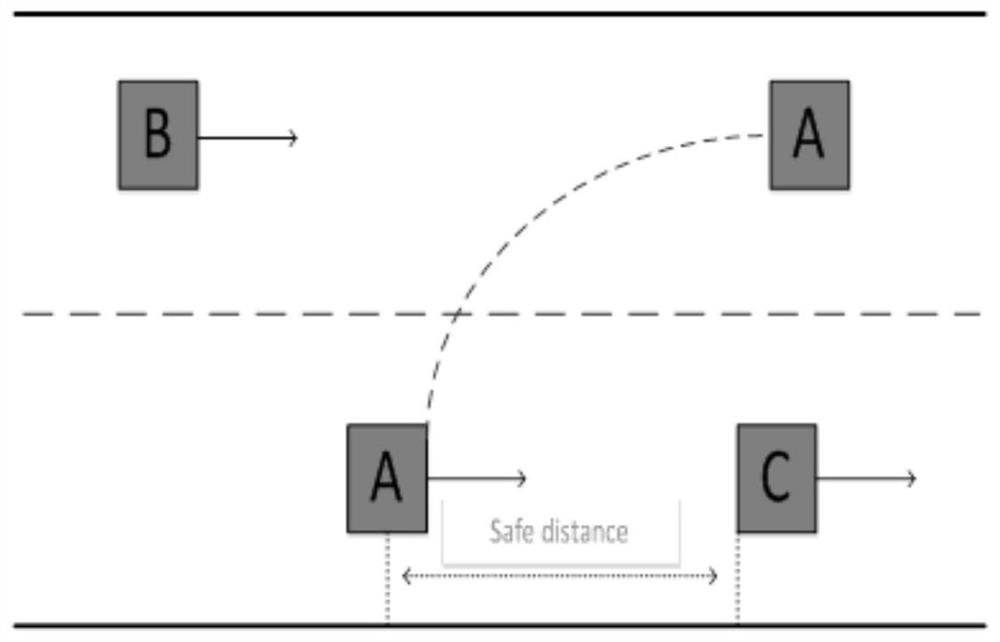
[0039] A vehicle obstacle avoidance trajectory planning method based on the Gaussian pseudospectral method, which uses numerical approximation techniques to transform the continuous optimal control problem into a discrete nonlinear programming problem, and solves the nonlinear programming problem numerically to obtain Under various constraints, the trajectory of the control variable and the trajectory of the state variable that make the performance index optimal include the following steps:
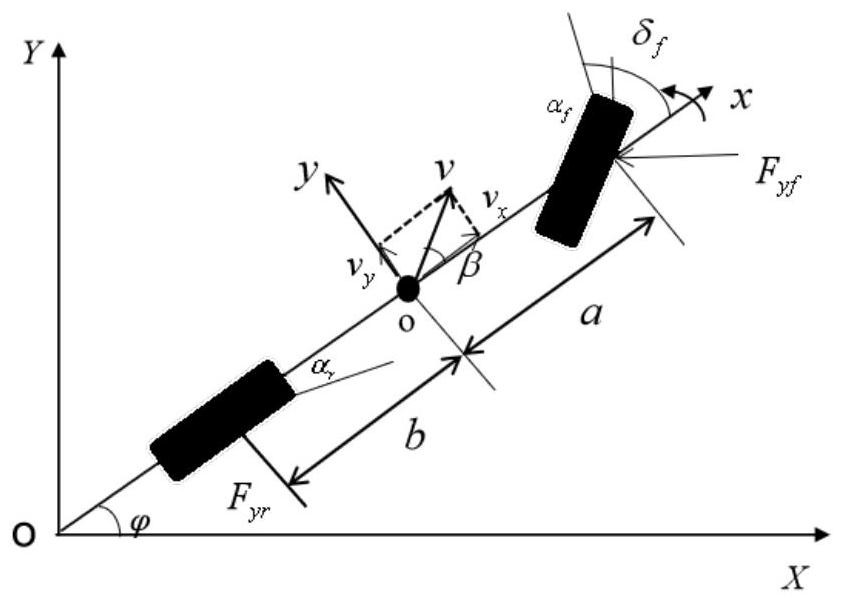
[0040] Step 1. Three-degree-of-freedom ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More