

Self-locking material clamping device with buffer
A buffer and material technology, applied in chucks, manufacturing tools, manipulators, etc., can solve problems such as emptying, potential safety hazards, material falling off, etc., and achieve the effect of compact overall structure, reduced overall weight, and guaranteed stability.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0038] The specific implementation manners of the present invention will be further described in detail below in conjunction with the accompanying drawings and embodiments. The following examples are used to illustrate the present invention, but are not intended to limit the scope of the present invention.
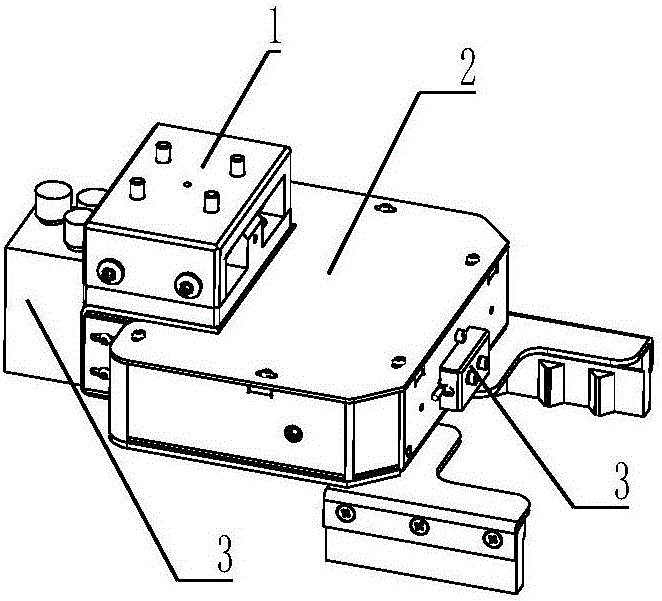
[0039] Such as figure 1 As shown, a self-locking material grasping device with a buffer according to the present invention includes a spring buffer mechanism 1 , an electric gripper 2 and a measuring element 3 .
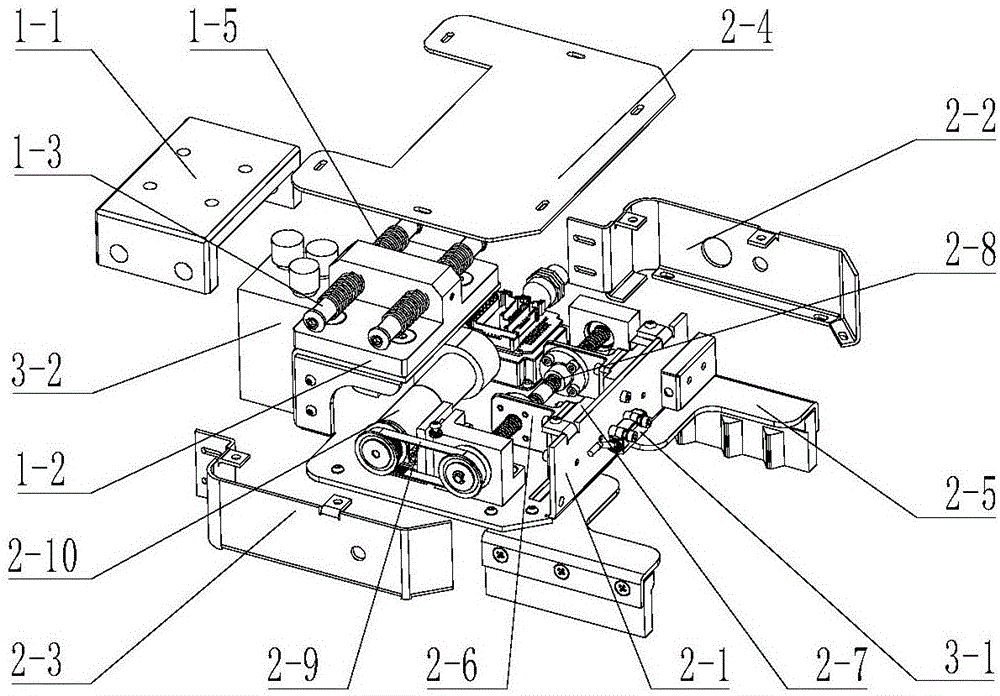
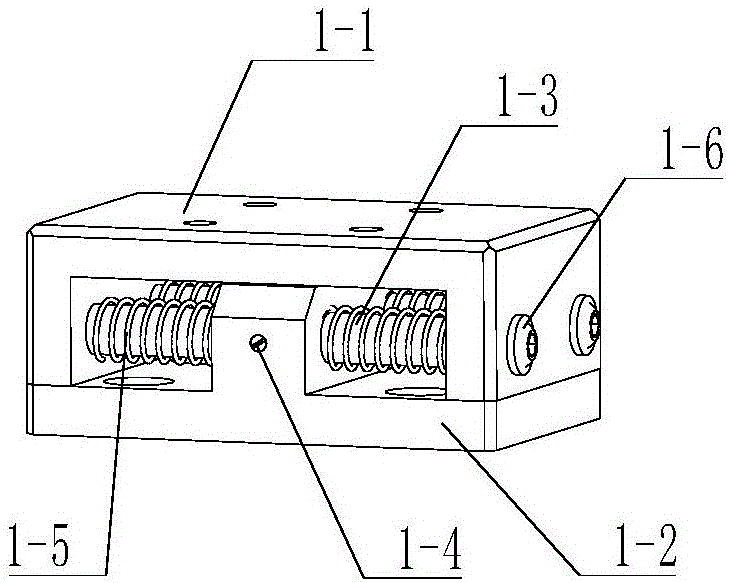
[0040] combine figure 1 , figure 2 , image 3 , Figure 4 with Figure 10 , the spring buffer mechanism 1 is composed of 1 connecting block 1-1, 1 first slide block 1-2, 2 guide shafts 1-3, 2 set screws 1-4, 4 springs 1-5 and 4 A group of connecting screws 1-6 is composed. The self-locking material gripping device 100 with a buffer is fixed on the mounting flange 20 at the end of the 6-DOF mechanical arm 10 through the connecting block 1-1, the first slid...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More