

A three-degree-of-freedom precision positioning platform in xyθ plane
A precision positioning and degree of freedom technology, applied in the direction of machine/support, supporting machine, mechanical equipment, etc., can solve the problems of assembly precision positioning influence, multiple assembly procedures, complex structure, etc., and achieve simple and compact structure, large stroke and High-bandwidth and high-precision displacement output, the effect of large output displacement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0024] The present invention will be further described below in conjunction with accompanying drawing:
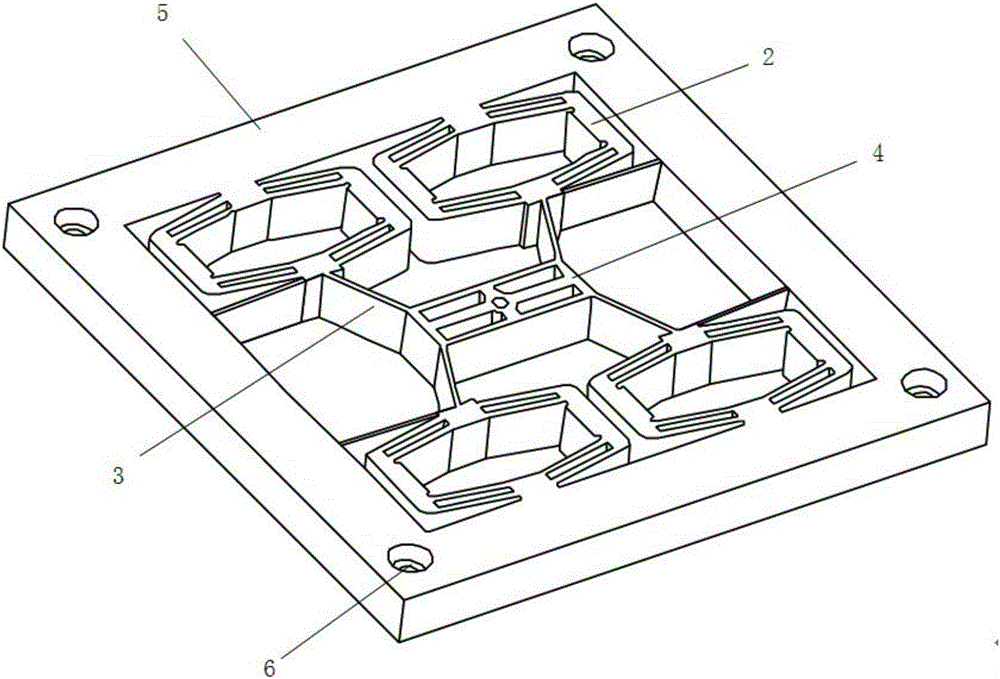
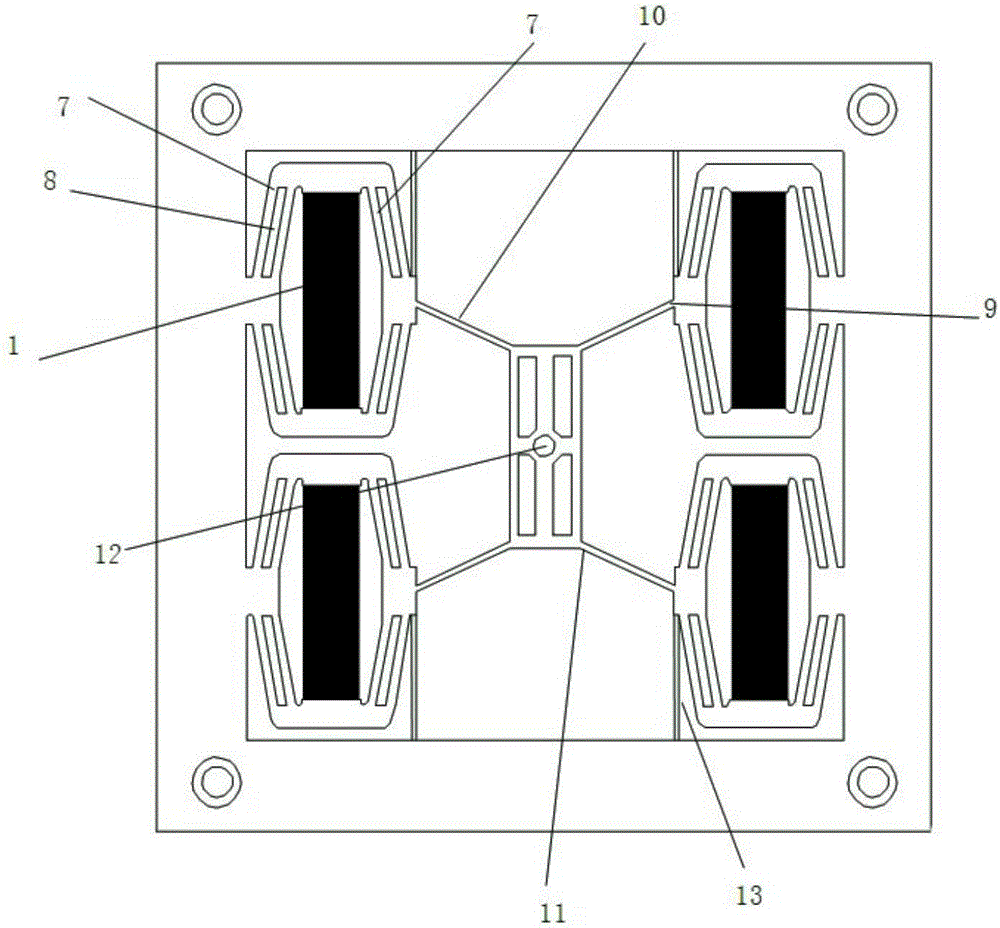
[0025] Such as figure 1 and figure 2 As shown, a XYθ plane three-degree-of-freedom precision positioning platform of the present invention includes a piezoelectric ceramic 1, a composite diamond displacement amplification mechanism 2, a bridge displacement amplification mechanism 3, a motion platform 4 and a fixed frame 5, and the piezoelectric ceramic 1 is installed on In the composite diamond-shaped displacement amplification mechanism 2, four composite diamond-shaped displacement amplification mechanisms 2 are arranged in parallel and are respectively located at the four corners of the fixed frame 5. The moving platform 4 is located at the center of the fixed frame 5. The displacement amplifying mechanism 3 is respectively connected with the compound rhombic displacement amplifying mechanism 2 located on both sides of the motion platform 4 .
[0026] The composite dia...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More