

Device and method for distance positioning and mileage calibration of railway robot
A technology for distance positioning and calibrating devices, which is applied in the direction of measuring devices, measuring distances, instruments, etc., can solve the problems of difficult positioning system, positioning error, low accuracy of ultrasonic positioning and RFID positioning, and achieve strong anti-interference ability and reduce Cumulative error, simple installation effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0017] The present invention will be further described below in conjunction with the accompanying drawings.
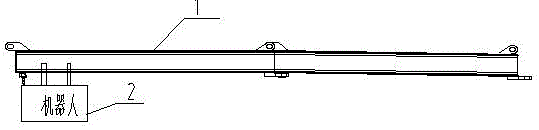
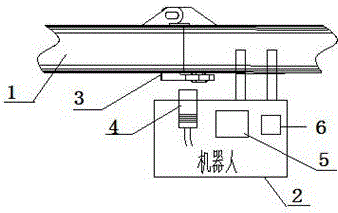
[0018] Such as Figure 1 to Figure 3 As shown, a track-type robot distance positioning and mileage calibration device includes: I-beam track (1), robot (2), lug seat (3), proximity sensor (4), mileage calculation device (5) and Motor shaft encoder (6).
[0019] The I-steel rails (1) are 6 meters each, and the two I-steel rails (1) are connected by lug seats (3). The lug seats (3) are protruding rigid connections, which are convenient for detection by the robot (2). , the distance between the two lug seats (3) is 6 meters; the proximity sensor (4), mileage calculation device (5) and motor shaft encoder (6) are installed on the body of the robot (2), and the robot (2) The I-beam track (1) runs and can reach the designated position.
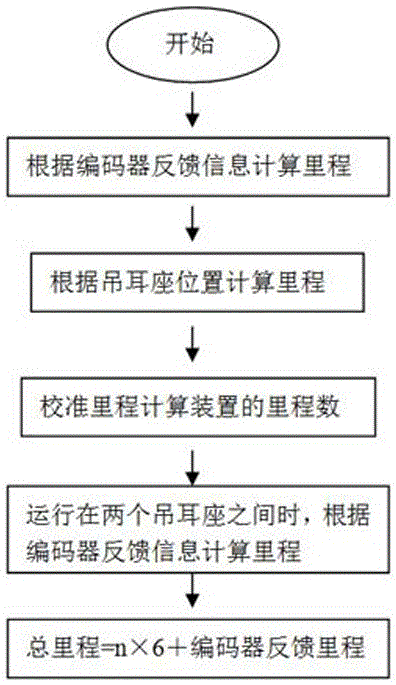
[0020] A method for distance positioning and mileage calibration of an orbital robot based on the above device:
[0021] Step 1: The ro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More