

Method for automatically recognizing various types of geometric elements in three-dimensional point cloud
A three-dimensional point cloud, automatic recognition technology, applied in image data processing, instrumentation, computing and other directions, can solve the problems of poor anti-interference ability, omission, and inability to analyze outliers and noise.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be further described below in conjunction with the accompanying drawings and embodiments. It should be pointed out that the described examples are only intended to facilitate the understanding of the present invention and do not have any limiting effect on it.
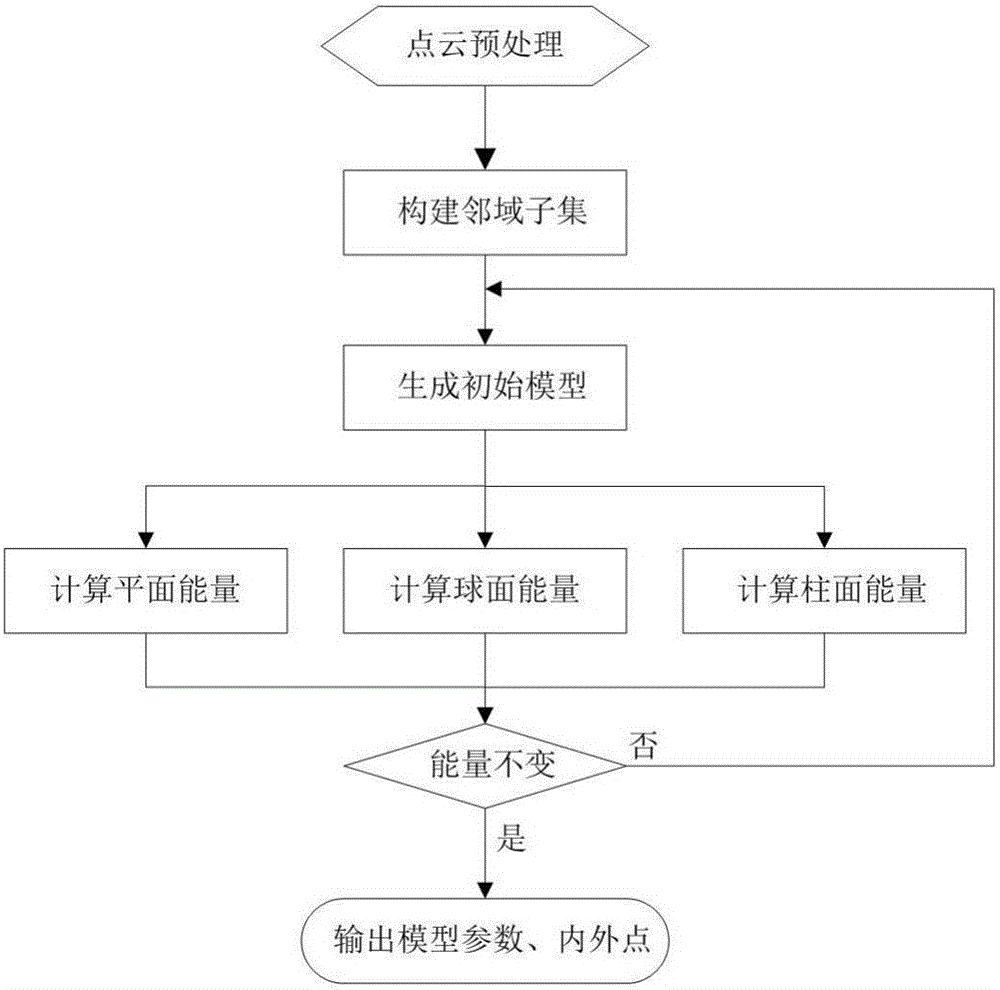
[0043] Such as figure 1 As shown, the embodiment of the present invention provides a method for automatically identifying multiple geometric primitives in a three-dimensional point cloud including:
[0044] Step 1: Perform voxel filtering, construct neighborhood structure and estimate normal vector preprocessing operations, the specific steps are as follows:
[0045] 1) Input the three-dimensional point cloud to obtain the maximum and minimum values of the x, y and z axis coordinates; calculate the size of the bounding box of the point cloud according to the maximum values of x, y and z, and compare the points according to the voxel side length The cloud is divided into voxels; the cente...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More