

Unmanned aerial vehicle taking off and landing platform based on parallel mechanism
A technology for take-off and landing platforms and drones, applied in the field of drones, can solve problems such as shock damage, and achieve the effects of reducing shock force, good stability, and good dynamic response
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0013] In order to make the technical means, creative features, goals and effects achieved by the present invention easy to understand, the present invention will be further described below in conjunction with specific illustrations.
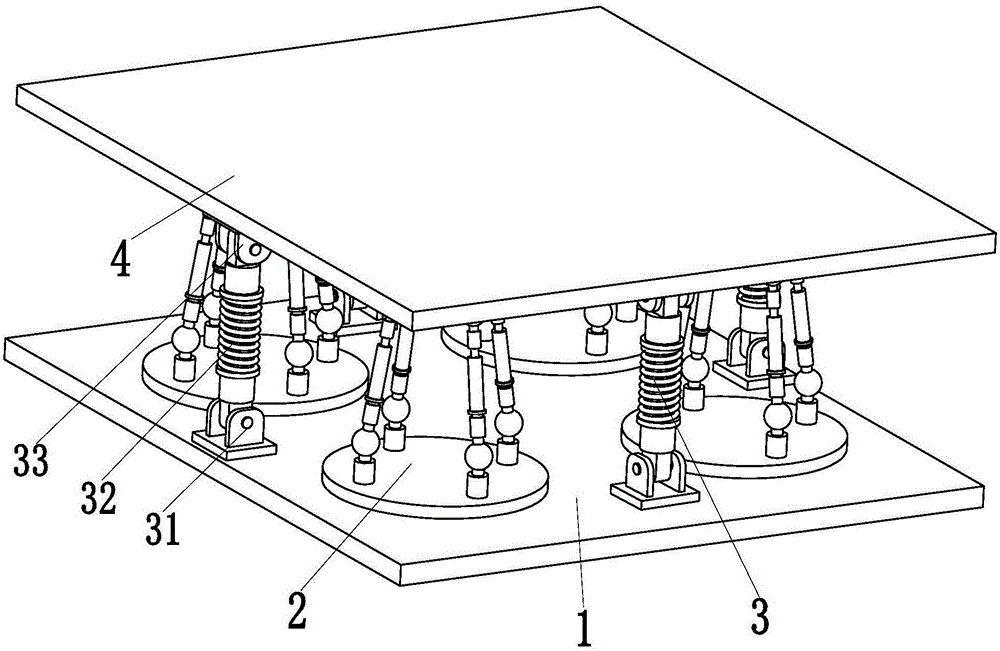
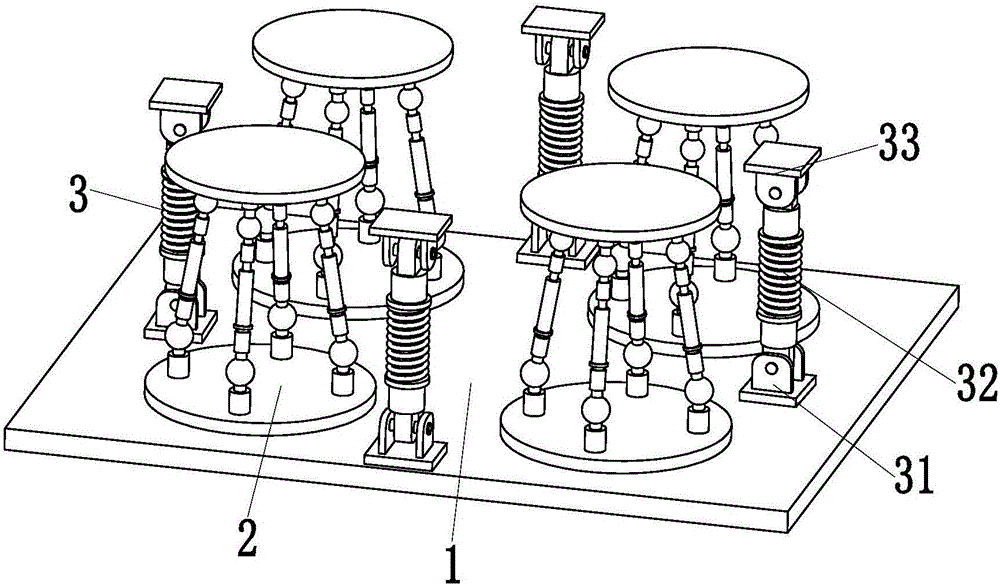
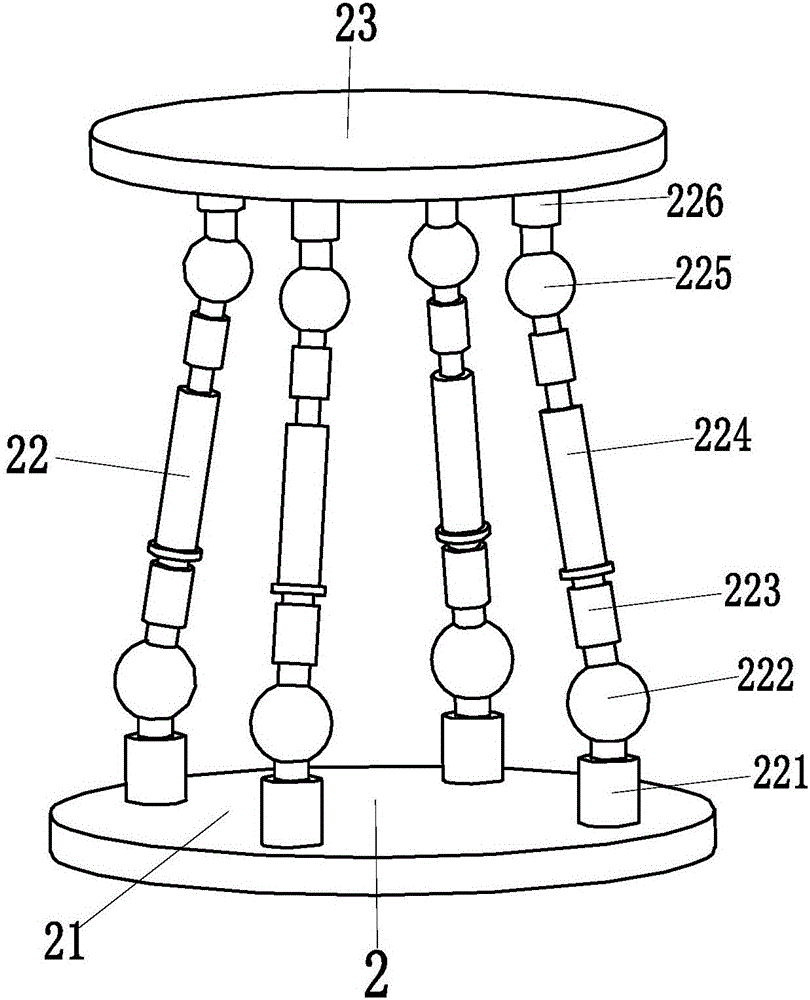
[0014] Such as Figure 1 to Figure 3 As shown, a UAV take-off and landing platform based on a parallel mechanism includes a base plate 1, and the upper end surface of the base plate 1 is symmetrically provided with four parallel support mechanisms 2 and four shock-absorbing branch chains 3, and two adjacent There is a parallel support mechanism 2 between the shock-absorbing branch chains 3, and the parallel support mechanism 2 is mainly based on the parallel mechanism. The parallel mechanism has the advantages of good dynamic response, high rigidity, large bearing capacity, good stability and high motion precision. Good stable support performance, and the shock-absorbing branch chain 3 has good shock-absorbing performance; the upper end surfaces...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More