

Visible light combined positioning system and method based on particle filter
A combined positioning and particle filtering technology, which is applied in the beacon system, radio wave measurement system, positioning and other directions using electromagnetic waves, and can solve the problems of multi-path interference areas where the visible light signal is not covered, and the positioning cannot be carried out.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0059] This embodiment describes the process of applying the "system and method for combining visible light positioning and inertial positioning based on particle filter" of the present invention to the scene of positioning and recognition targeting pedestrians.
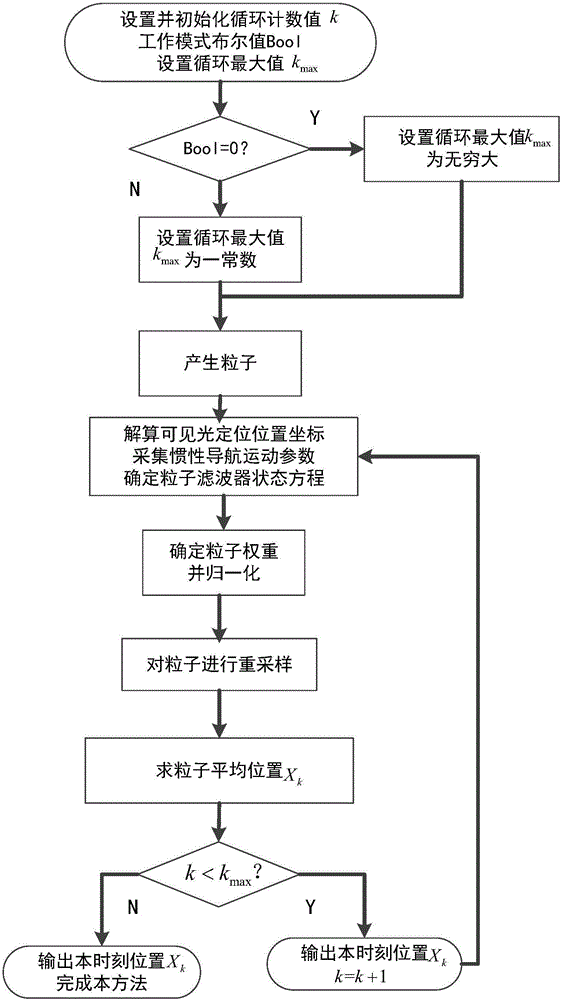
[0060] figure 1 It is an algorithm flow chart of this method and a flow chart of this embodiment. As can be seen from the figure, the method includes the following steps:
[0061] Step A: Set and initialize the loop count value k, the working mode Boolean value Bool; set the loop maximum value k max ;
[0062] Specifically in this embodiment, k is initialized to 1;
[0063] Step B: Determine whether the Bool value is 0, and perform corresponding operations:
[0064] B.1 If yes, corresponding figure 1 "Bool=0?" in the Y output, set the loop maximum k max is infinity;
[0065] B.2 If not, corresponding figure 1 "Bool=0?" in the output of N, loop maximum k max is a constant;
[0066] Specific to this embodimen...
Embodiment 2
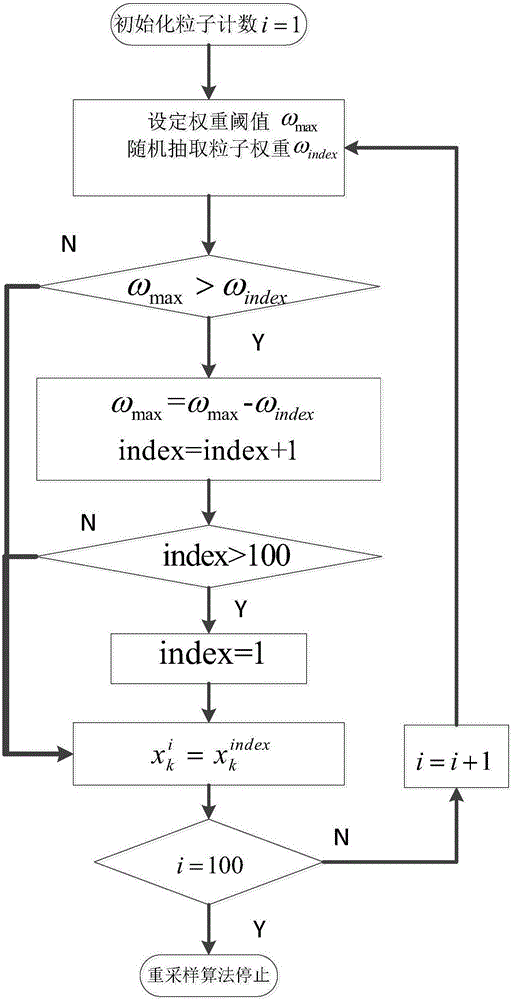
[0082] This embodiment specifically illustrates the simple random resampling method described in step 5 of the present invention and the resampling algorithm of step F in embodiment 1, and the algorithm flow is as follows figure 2 shown. From figure 2 It can be seen that the specific steps of the resampling algorithm are:
[0083] Step F.1: Initialize particle count i=1;
[0084] Step F.2: Set weight threshold ω max and random particle weight ω index ;
[0085] where the weight threshold is ω max =2×max(ω)×rand, rand is a random number uniformly distributed between 0 and 1, and max(ω) is the maximum weight among all 100 particles at time k;
[0086] Among them: random selection of particle weight ω index The method is to randomly extract the index particle from the i-th to the 100th particle, and record the weight of the particle as ω index ;
[0087] Step F.3: Determine whether ω max > ω index , and perform corresponding operations, specifically:
[0088] F.31: ...
Embodiment 3
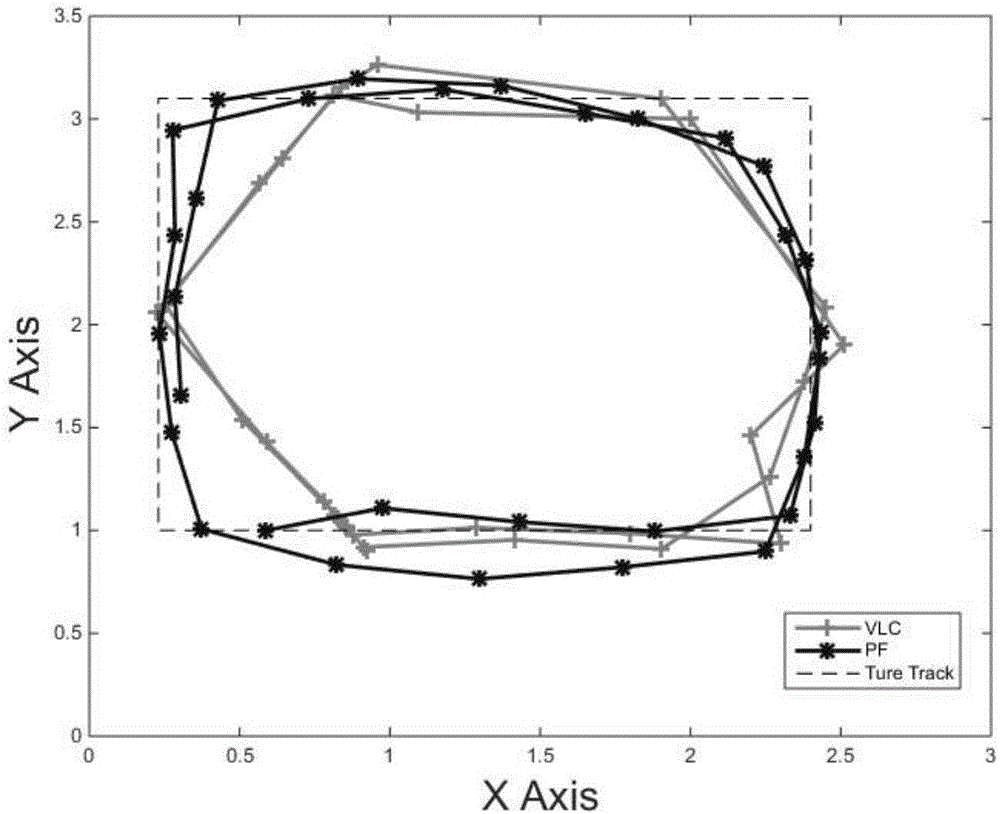
[0099] In this embodiment, according to the parameters described in Embodiment 1 and the resampling method described in Embodiment 2, the k obtained from steps 1 to 7 of the present invention are specifically described. max A combined positioning position result is compared with the positioning position result obtained by the existing visible light positioning method at the same time. The comparison results are as follows: image 3 .
[0100] image 3 Among them, X Axis represents the abscissa, and its unit is meter; Y Axis represents the vertical coordinate, and its unit is meter; image 3 The dotted line in the middle, that is: "True Track" is the real trajectory of pedestrians; the dashed line in the star, that is: "PF" is the step 1 of "a particle filter-based combined visible light positioning method (referred to as this method)" proposed by the present invention The combined positioning position trajectory calculation result obtained in step 7; the crossed line, that i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More