

Lsd-slam-based real-scene three-dimensional reconstruction method
A 3D reconstruction and real scene technology, applied in the field of computer vision, can solve the problems of 3D model texture distortion, difficulty in popularization, and low efficiency
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
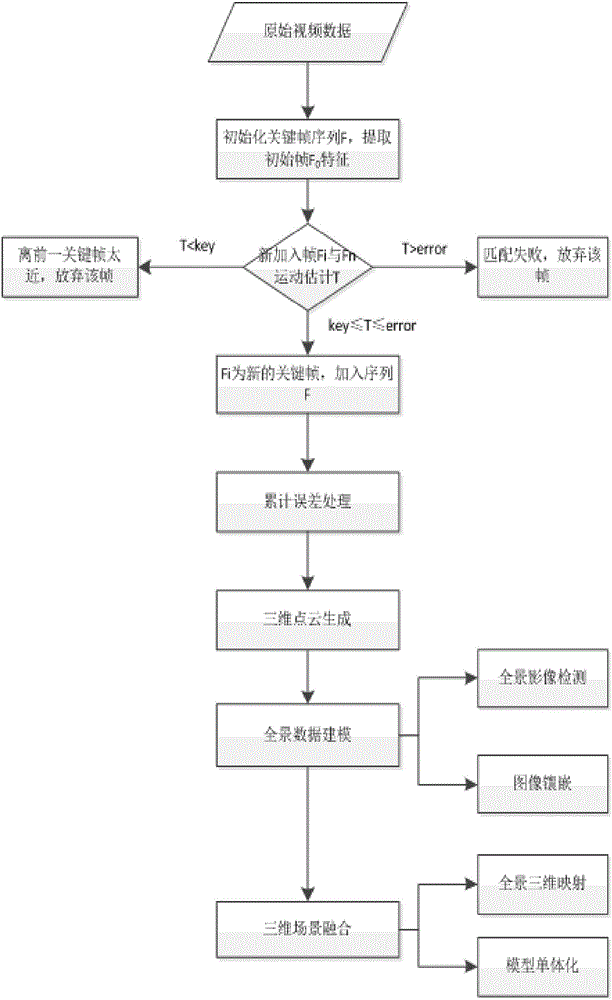
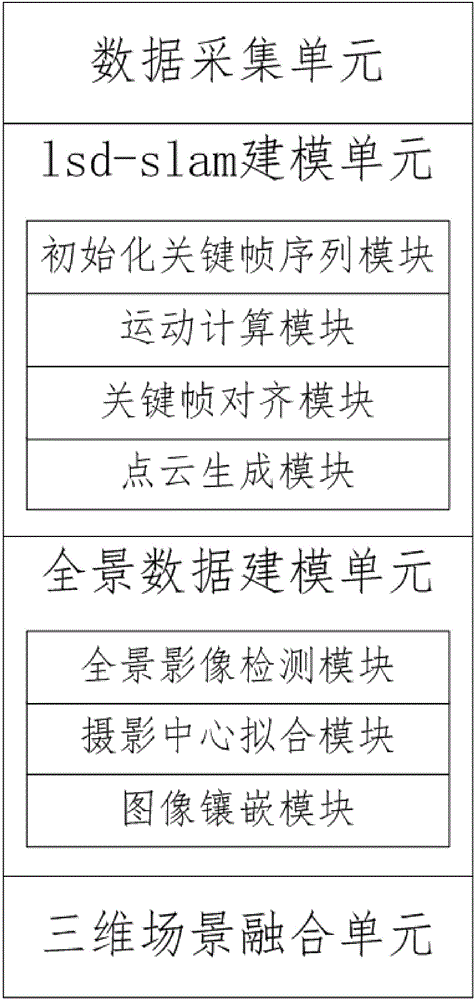
[0019] like figure 1 As shown, a real-scene 3D reconstruction method based on lsd-slam includes the following steps: S1, record the scene to be modeled, and collect video data covering the modeled scene; S2, use lsd-slam modeling technology to solve Calculate the key frame pose to obtain the image of restored 3D information, and generate a 3D space point cloud; S3, select an image that can be stitched into a panorama from the image of the restored 3D information according to the spatial position relationship, and generate a panorama image; S4, convert the panorama The image and the 3D space point cloud are included in the same spatial reference system, and the 3D data is singly processed. Acquire and analyze video data to get key frames, analyze key frames to generate 3D space point cloud and panoramic image, realize 3D reconstruction through 3D space point cloud and panoramic image, do not calibrate the equipment, do not rely on special hardware equipment, and simultaneously ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More