Imitation snake search and rescue robot joint mechanism
A technology of robot joints and joints, which is applied in the direction of manipulators, manufacturing tools, joints, etc., can solve the problems of insufficient adaptability, slow speed of crawler snake robots, and poor flexibility of steering gear snake robots, etc., to achieve easy design and optimization, high efficiency The effect of inspection and maintenance and enhancing environmental adaptability
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0032] The following figures will further illustrate the present invention in conjunction with the accompanying drawings.
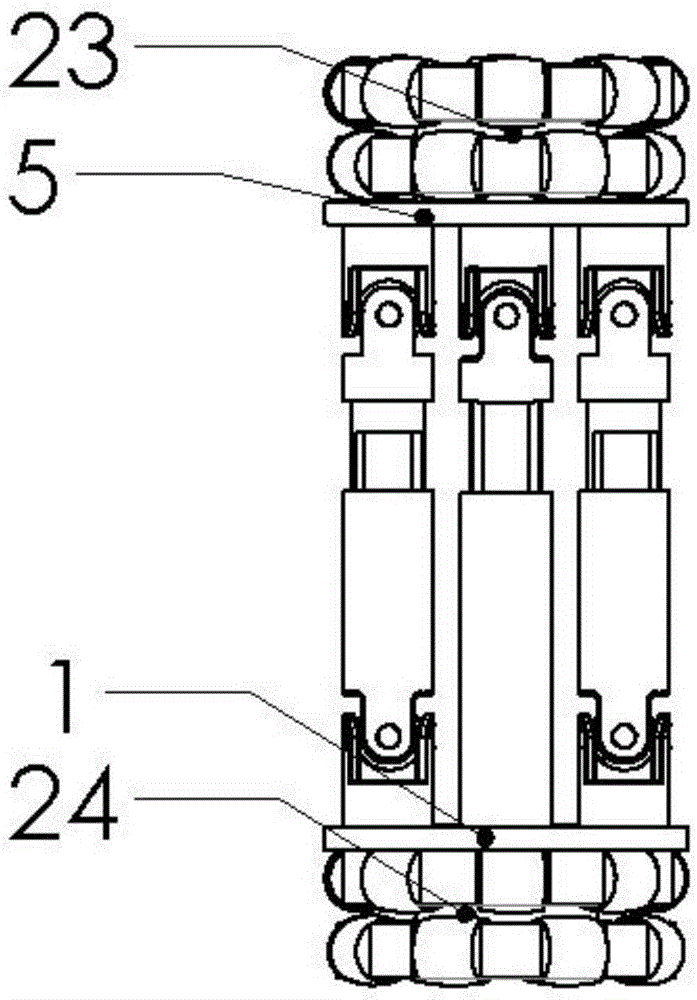
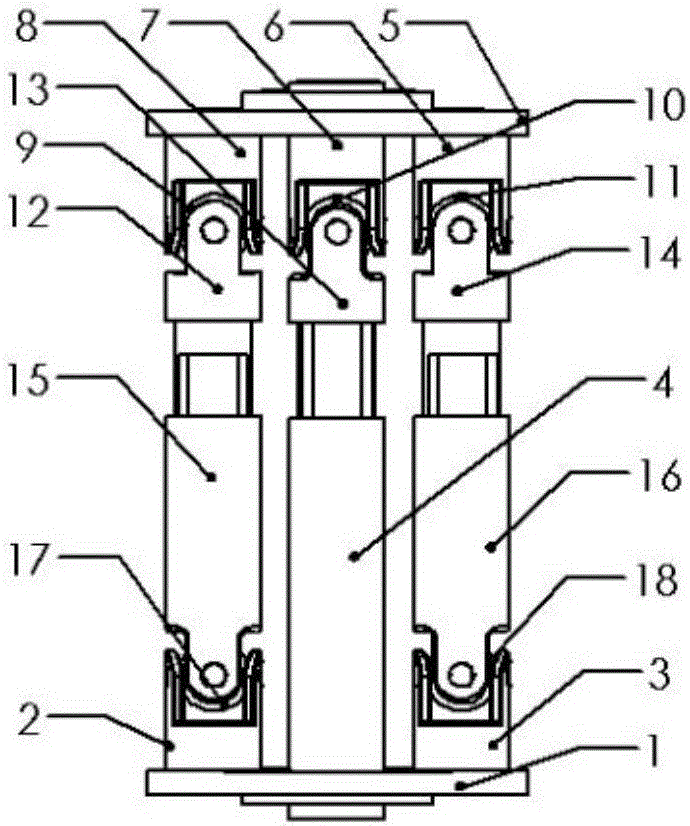
[0033] see figure 1 , the joint mechanism of the snake-like search and rescue robot provided by the present invention includes an upper omnidirectional wheel I, a parallel joint group II, and a lower omnidirectional wheel III. The connecting shaft 23 of the upper omnidirectional wheel and the connecting shaft 24 of the lower omnidirectional wheel are respectively connected with the parallel joint The circular end cover base 5 of the group is fixedly connected with the circular end cover base 1 of the fixed platform.
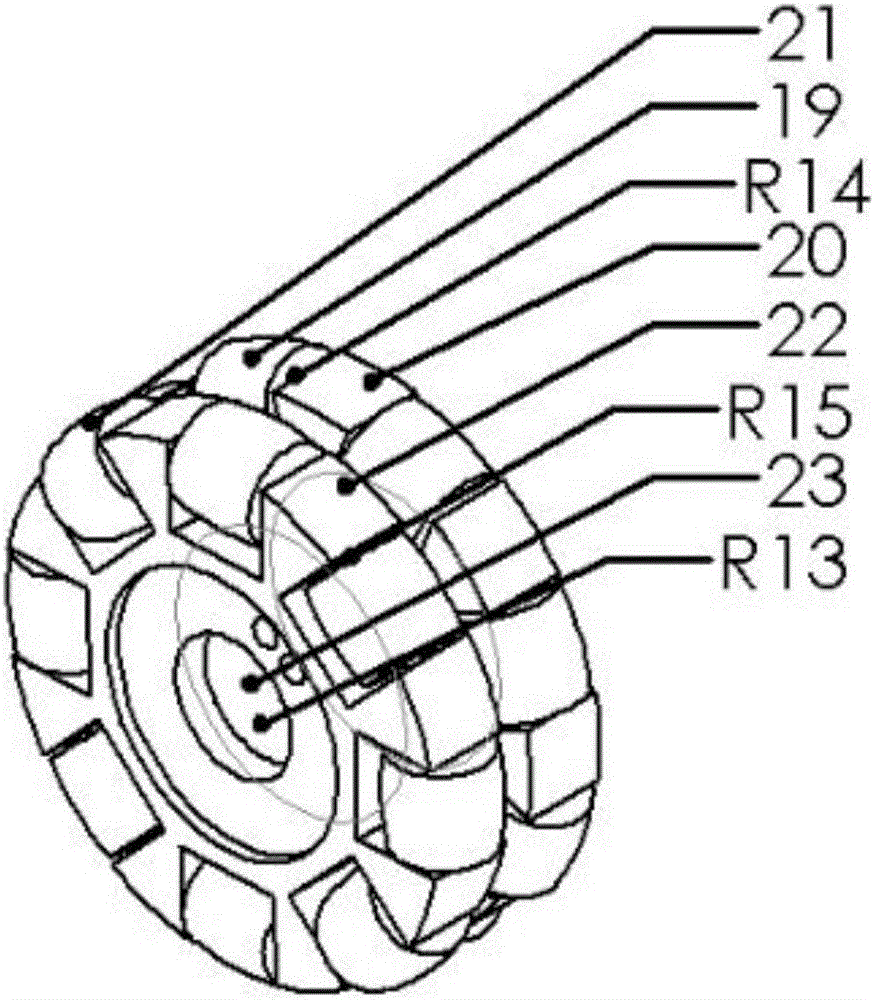
[0034] see figure 2 , the omnidirectional wheel I is composed of two omnidirectional wheel support wheels and an omnidirectional wheel connecting shaft 23, each omnidirectional wheel support wheel is composed of an omnidirectional wheel axle 20 and eight driven wheels 19, and the driven wheels 19 The fourteenth rotary pair R14 on the top ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More