

A dual tail fin bionic robotic fish based on crank-slider structure
A crank-slider mechanism and robotic fish technology, which is applied to non-rotating propulsion elements and other directions, can solve problems such as the failure of bionic robotic fish to achieve performance indicators, and achieve the advantages of improving cruising efficiency and speed, eliminating lateral forces and improving stability. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0028] The present invention will be further described below in conjunction with the accompanying drawings and specific embodiments.
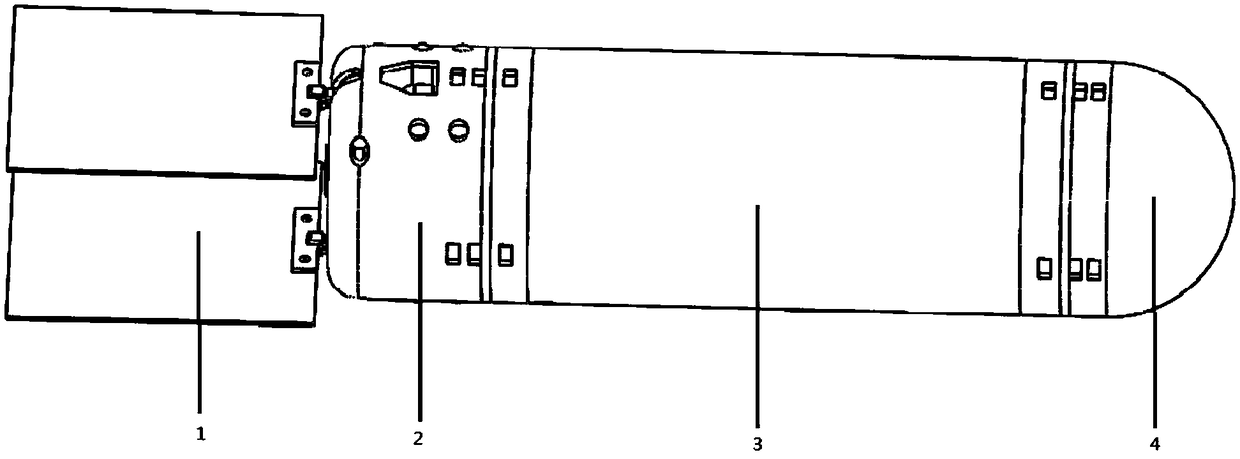
[0029] figure 1 It is the 3D drawing of the general assembly of the bionic robot fish. It can be seen from the general assembly drawing that the bionic robotic fish consists of four parts: caudal fin 1, fish tail 2, fish body 3 and fish head 4. The innovation of the present invention lies in the unique crank-slider transmission mechanism at the tail, so we will focus on the 2 parts of the fishtail.
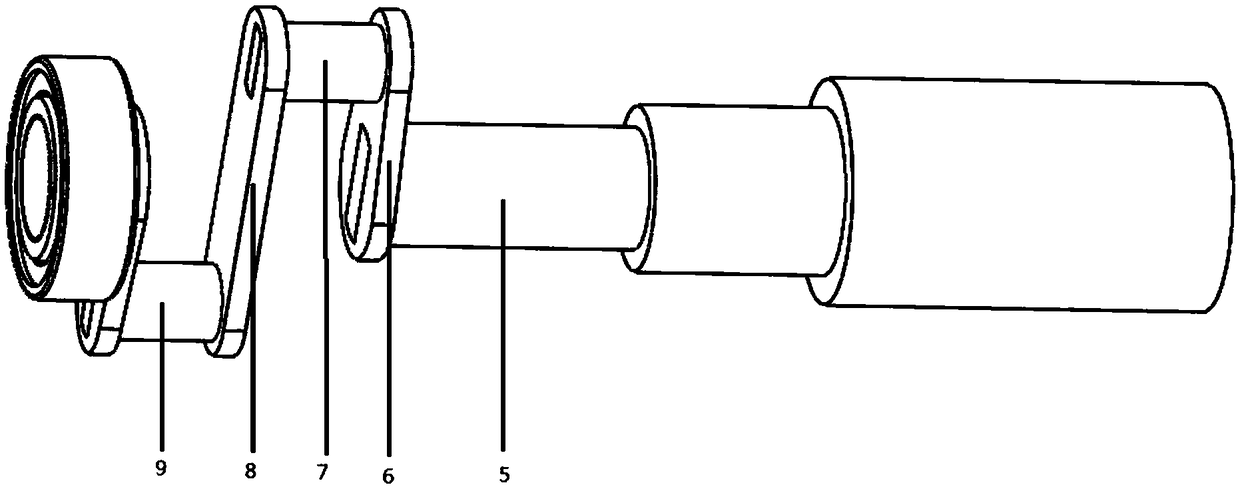
[0030] figure 2 It is the transmission structure diagram of the internal part of the fishtail. exist figure 2 It can be seen in the figure that the output shaft 5 of the motor is connected with the first crank 6 through the cooperation between the key grooves, and the key groove at the other end of the first crank 6 is matched with the first short shaft 7, and then the second crank 6 is connected in the same way. The first short shaft 7 and ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More