

Method for achieving indoor positioning of robot through image identification
An indoor positioning and image recognition technology, applied in character and pattern recognition, instrument, photo interpretation, etc., can solve the problems of easy to be blocked and interfered, low positioning accuracy, expensive erection cost, etc., to achieve low erection cost and improve resolution , the effect of easy machine vision integration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
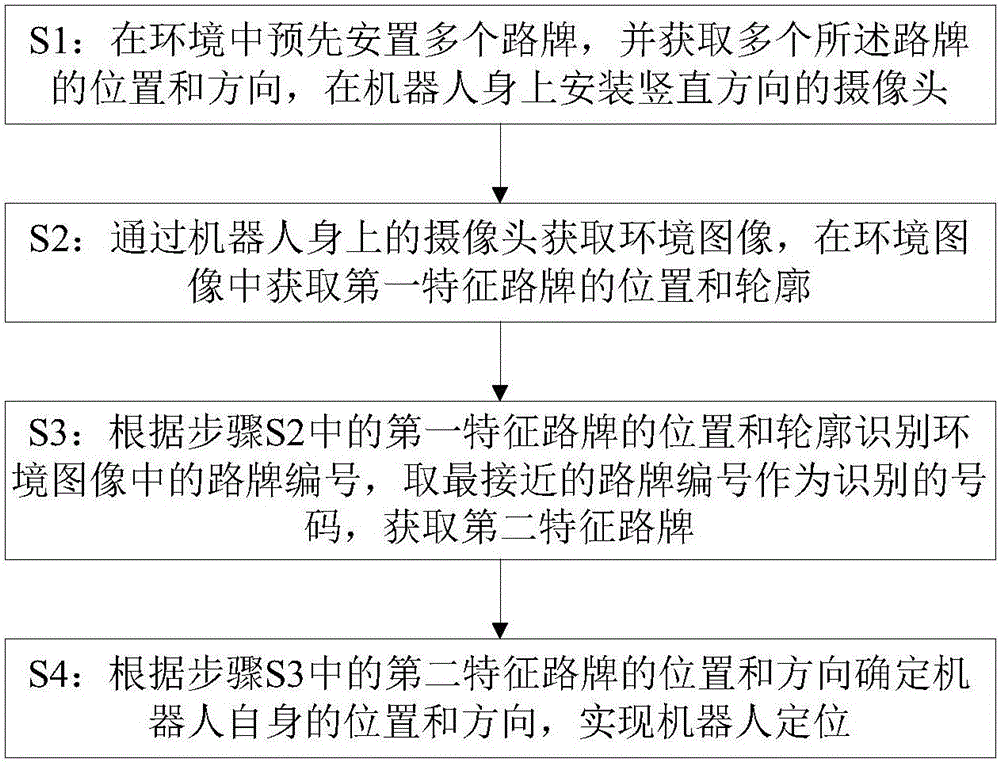
[0049] Such as figure 1 As shown, a method for realizing indoor positioning of a robot by image recognition of the present invention comprises the following steps:
[0050] S1: Pre-position multiple street signs in the environment, obtain the positions and directions of multiple street signs, and install a vertical camera on the robot. In this embodiment, the positions and directions of the plurality of road signs are specified during installation or obtained through measurement after installation. A plurality of said street signs are street signs with white characters on a blue background.
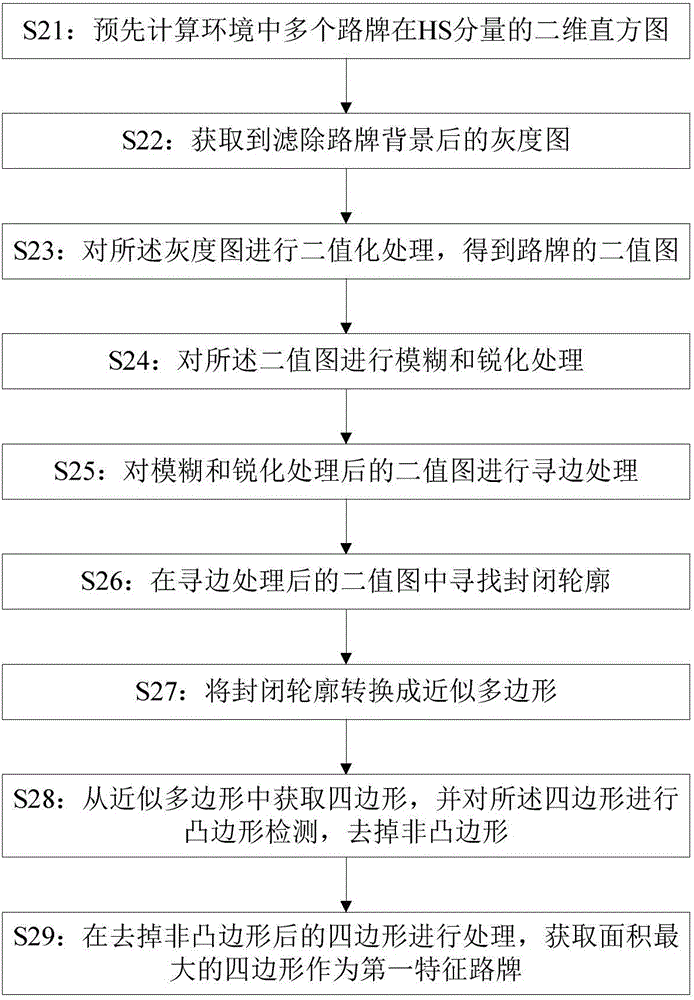
[0051] S2: Obtain the environment image through the camera on the robot, and obtain the position and outline of the first characteristic road sign in the environment image. Such as figure 2 As shown, the step S2 specifically includes the following steps:
[0052] S21: if image 3 As shown in FIG. 2 , the two-dimensional histograms of the HS components of multiple street signs in the...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More