

Indoor navigation method and device
An indoor navigation and object technology, applied in the navigation field, can solve problems such as low positioning accuracy, complex equipment, and difficult deployment, and achieve the effects of improving accuracy, optimizing indoor navigation technology, and reducing implementation costs
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
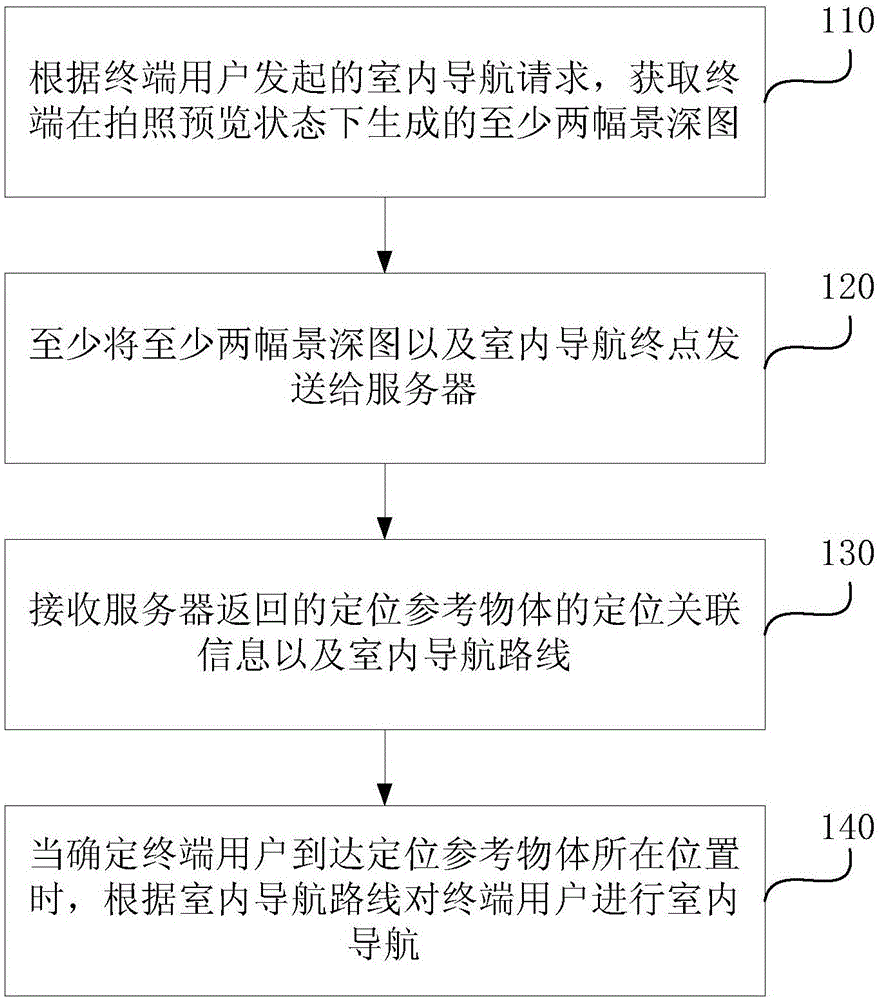
[0039] figure 1 It is a flow chart of an indoor navigation method provided by Embodiment 1 of the present invention. The method can be executed by an indoor navigation device. The device can be implemented by software and / or hardware, and generally can be integrated into a terminal capable of obtaining a depth map, and A server pre-stored with an indoor map library is used in conjunction with the terminal, wherein the terminal may include a digital camera, a smart phone, a tablet computer, and the like. Such as figure 1 As shown, the method of this embodiment specifically includes:
[0040] 110. According to the indoor navigation request initiated by the terminal user, obtain at least two depth maps generated by the terminal in the photo preview state, wherein two adjacent depth maps include overlapping areas, and the indoor navigation request includes at least the terminal The indoor navigation end point entered by the user.
[0041] In this embodiment, the indoor navigati...
Embodiment 2
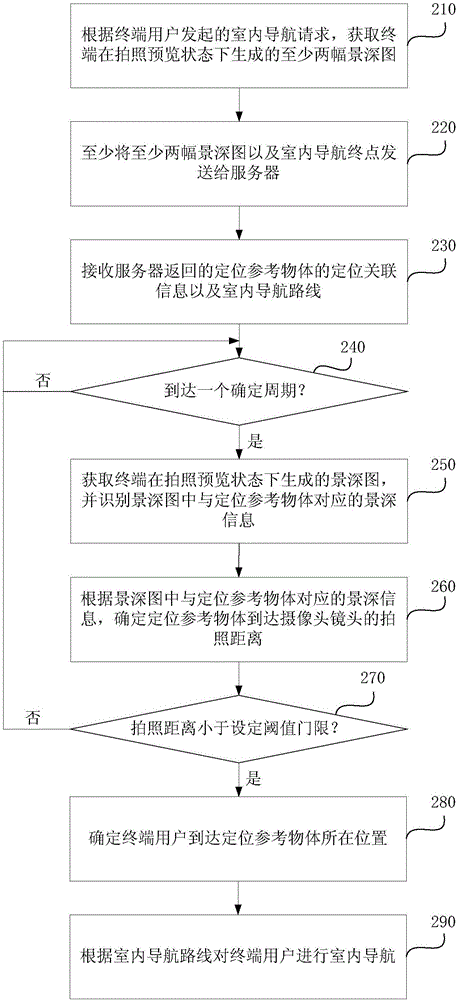
[0073] figure 2 It is a schematic flowchart of an indoor navigation method provided by Embodiment 2 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In this embodiment, determining that the terminal user arrives at the location of the positioning reference object is specifically: when any certain period arrives, obtain the previewing the depth of field map generated in the state, and identifying the depth of field information corresponding to the positioning reference object in the real-time depth of field map; determining the positioning reference object according to the depth of field information corresponding to the positioning reference object in the depth of field map The photographing distance to the camera lens, wherein the depth of field information includes the distance information between the subject and the camera lens; if the photographing distance is less than the set threshold threshold, it is determined that...
Embodiment 3
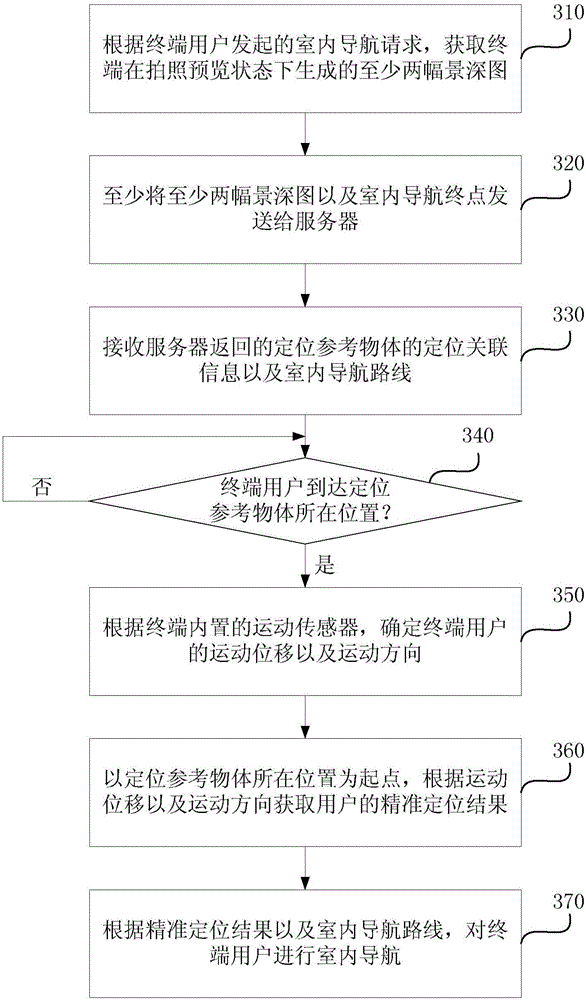
[0090] image 3 It is a schematic flowchart of an indoor navigation method provided by Embodiment 3 of the present invention. This embodiment is embodied on the basis of the above-mentioned embodiments. In this embodiment, the indoor navigation for the terminal user according to the indoor navigation route is specifically as follows: according to the built-in motion sensor of the terminal, determine the The user's movement displacement and movement direction; starting from the location of the positioning reference object, the precise positioning result of the user is obtained according to the movement displacement and the movement direction; according to the precise positioning result and the indoor navigation route, the The terminal user performs indoor navigation. Correspondingly, the method in this embodiment specifically includes:
[0091] 310. According to the indoor navigation request initiated by the terminal user, obtain at least two depth maps generated by the termi...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More