Event driving based generalized predictive and self-adaptive supply ship navigation direction control method
An event-driven, generalized prediction technology used in adaptive control, two-dimensional position/channel control, non-electric variable control, etc.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0045] The present invention will be further described in detail below in conjunction with the accompanying drawings and specific embodiments.
[0046] From the point of view of the whole replenishment process, the present invention can be divided into three stages:
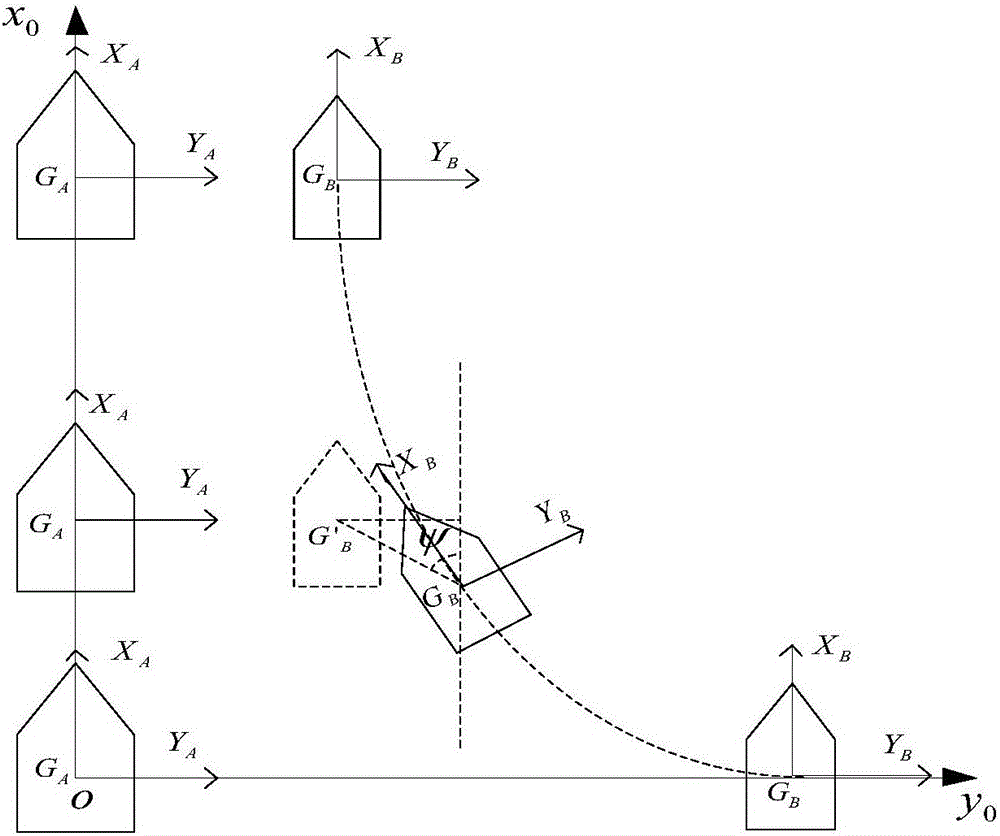
[0047] (1) Approaching stage: when the supply ship sails from a distance to the vicinity of the receiving ship;
[0048] (2) Parallel stage: When the supply ship is close to the receiving ship and reaches the supply distance range and waits for supply;
[0049] (3) Replenishment stage: when the replenishment ship and the receiving ship are performing replenishment operations.
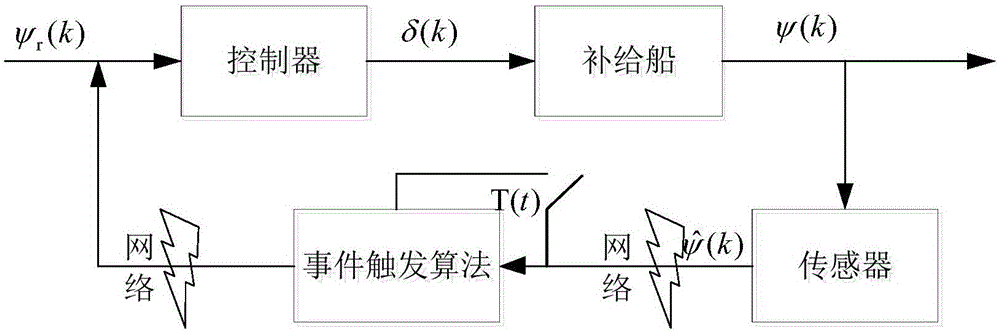
[0050] First, select the discrete event trigger working in the discrete state, and design the trigger judgment function under the variable threshold value. When the trigger time is reached, the event trigger judges whether the current state meets the trigger condition through the trigger judgment function. The trigger judgment function ad...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More 
PatSnap Eureka turns technology decisions into work you can execute. Powered by our Innovation Knowledge Graph, it runs expert workflows across engineering, life sciences, materials and intellectual property. Get your review-ready output in minutes.



