

Nozzle calibration method of 3D printer
A technology of a 3D printer and a calibration method, which is applied in the field of 3D printing, can solve problems such as large calibration errors affecting printing efficiency, affecting printing efficiency and printing quality, and operating experience limitations, so as to improve practicability and applicability, improve printing quality and The success rate and the effect of solving the limitation of operation experience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
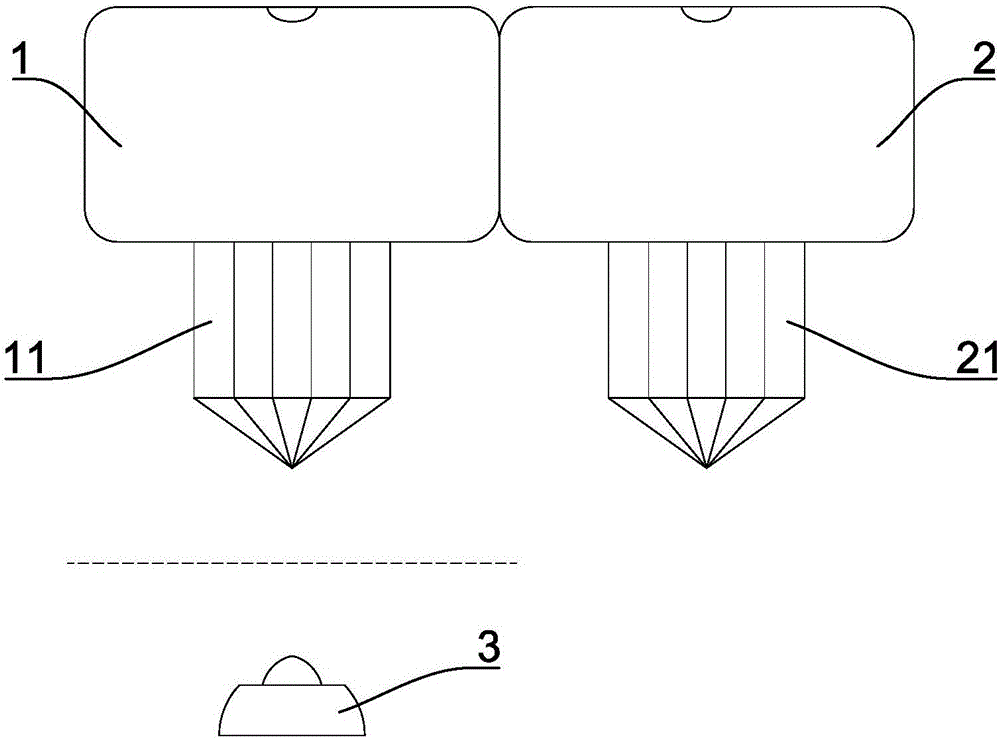
[0029] Such as figure 1 with figure 2 Shown is a specific implementation of a 3D printer nozzle calibration method of the present invention, which mainly includes the following steps:
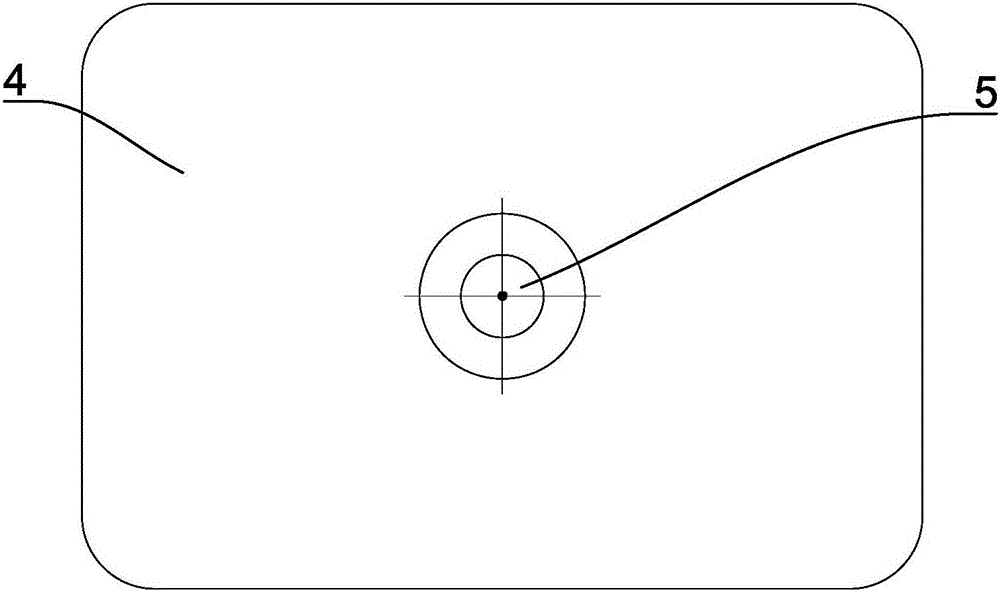
[0030] 1. Establish a calibration area, and set up a camera with a vertical optical axis and facing up in the calibration area; connect the camera to the control system of the 3D printer;
[0031] 2. Establish a real-time display window corresponding to the calibration area in the control system;
[0032] 3. The nozzle composed of the main nozzle and the auxiliary nozzle is moved to the top of the calibration area through the control of the control system;
[0033] 4. Move the nozzle as a whole in the x-y plane of the calibration area, and observe through the real-time display window to obtain the position of the main nozzle and the auxiliary nozzle, determine the relative distance between the two according to the position of the main nozzle and the auxiliary nozzle, record is (△x,△y);
[...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More