

Self-adaption sand land biomimetic mechanical foot
A bionic mechanical and self-adaptive technology, applied in motor vehicles, transportation and packaging, etc., can solve problems such as not being able to meet the needs of walking, and achieve the effects of simple structure, good effect of sand fixation and flow limitation, and convenient control
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
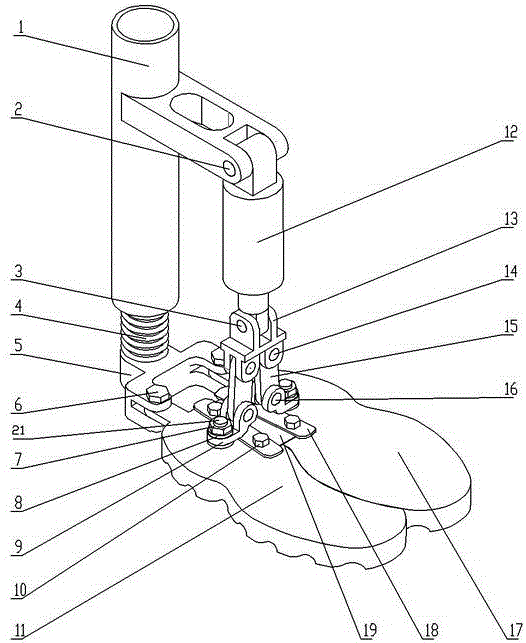
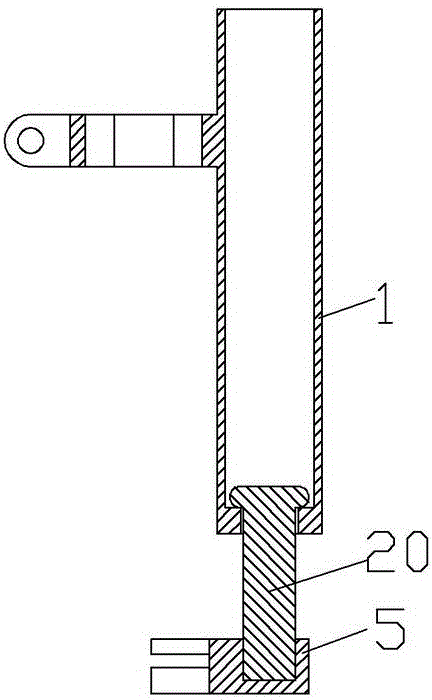
[0028] Such as figure 1 , figure 2 , image 3 , Figure 4 , Figure 5 , Image 6 with Figure 7 As shown, the present invention includes a bracket 1, a first pin 2, a second pin 3, a spring 4, a sole 5, a first stud 6, a nut 7, a washer 8, a second connector 9, and a second screw Column 10, second toe 11, linear motor 12, first connector 13, third pin 14, connecting rod 15, fourth pin 16, first toe 17, rectangular iron sheet 18, elastic fabric 19 and Connect the post 20 and the third stud 21.
[0029] The upper end of the bracket 1 is connected to the robot leg by thread or clamping; the bracket 1 is a hollow structure, and the connecting column 20 passes through the lower end of the bracket 1. The bracket 1 can move up and down along the connecting column 20, and the connecting column 20 and the sole 5 are threaded For connection and connection, the spring 4 is sleeved on the connecting post 20, and the pre-tightening force of the spring 4 is adjusted through the sole 5. When ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More