

Autonomous navigation system for drone and navigation method of autonomous navigation system
An autonomous navigation system and unmanned aerial vehicle technology, applied in the autonomous navigation system of unmanned aerial vehicles and its navigation field, can solve the problems of being unable to judge the route and flight path by itself, relying on GPS satellite signals, and unmanned aerial vehicles unable to realize autonomous flight
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment approach
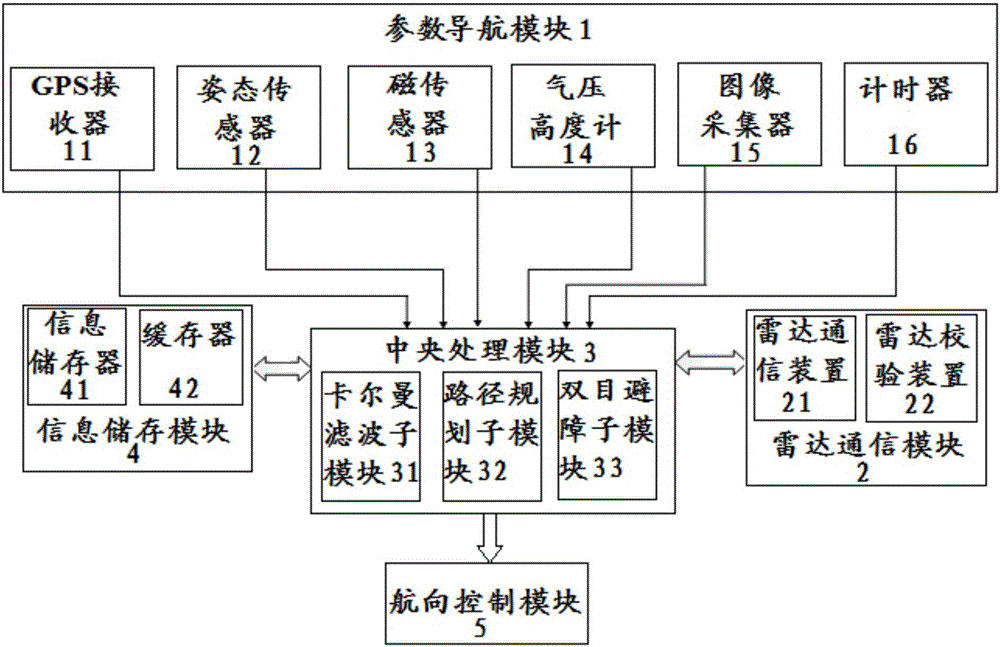
[0087] According to a preferred embodiment of the present invention, the parameter navigation module 1 includes a GPS receiver 11 , an attitude sensor 12 , a magnetic sensor 13 , a barometric altimeter 14 , an image collector 15 and a timer 16 .
[0088] Wherein, the GPS receiver 11 is used to receive GPS signals; the attitude sensor 12 is used to output the attitude parameter (attitude angle) of the drone; the magnetic sensor 13 is used to output the geomagnetic parameter of the location of the drone; The barometric altimeter 14 is used to output air pressure parameters and altitude parameters of the location of the drone; the image collector 15 is used to capture environmental information and output the information.
[0089] Wherein, the attitude parameters include the roll angle, pitch angle, yaw angle, etc. of the UAV; the geomagnetic parameter refers to the magnetic field size of the current position of the UAV, and the UAV can be positioned according to the magnetic field...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More