

Indoor unmanned aerial vehicle accurate positioning and autonomous navigation system and method
A technology for autonomous navigation and precise positioning, applied in the field of unmanned aerial vehicles, it can solve the problems that the positioning accuracy cannot meet the requirements, difficult to promote, and technical limitations, and achieve the effect of expanding diversity, reliable performance and high accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
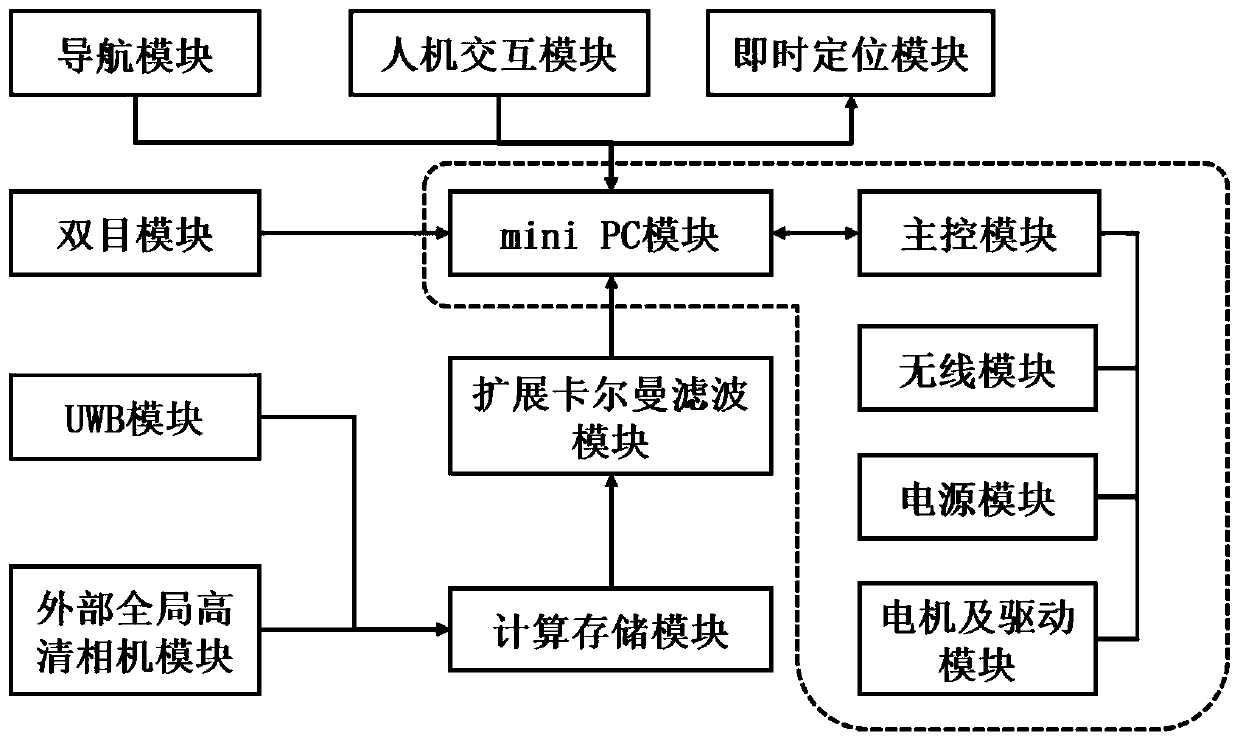
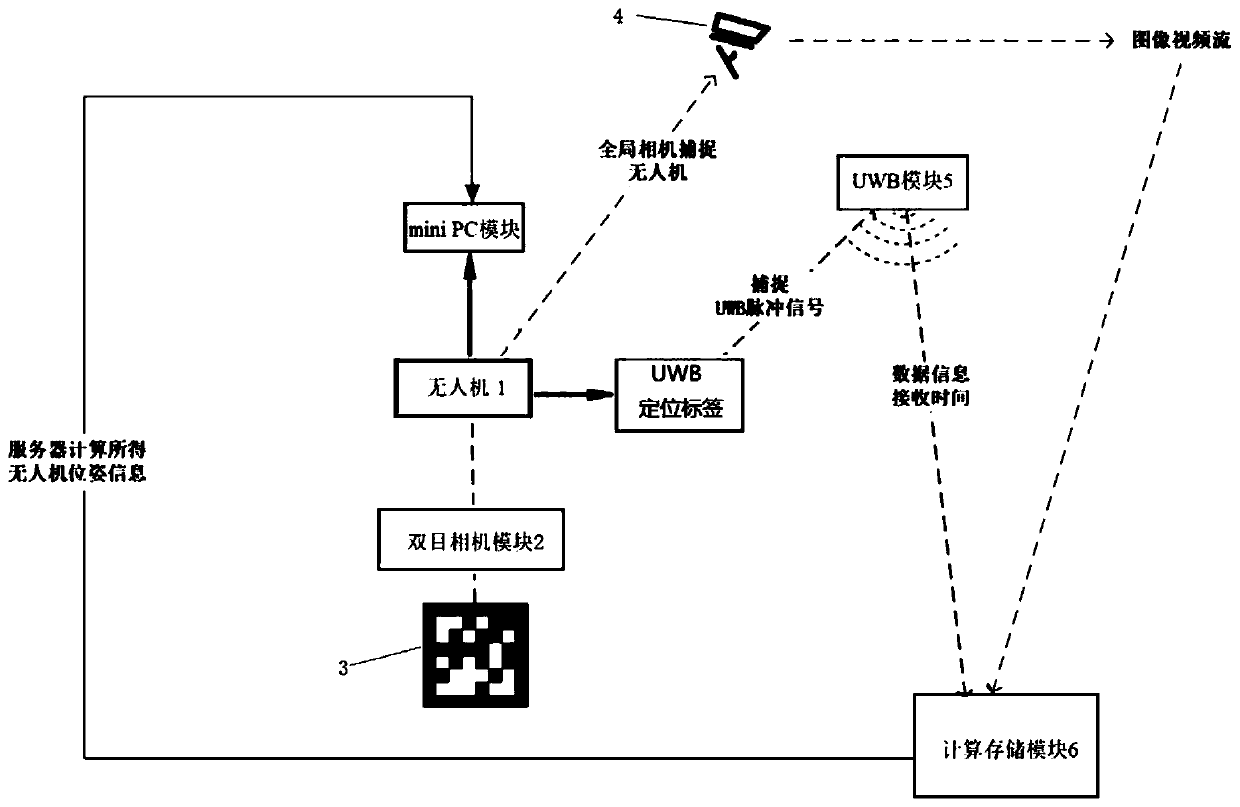
[0061] This embodiment is dedicated to providing a system for precise positioning and autonomous navigation of indoor drones based on the fusion of UWB (Ultra Wideband, ultra-wideband) and visual sensors. The fusion of UWB and visual sensors is an information processing process that uses computer technology to automatically analyze and synthesize the multi-source information and data of each sensor under certain criteria to complete the required decision-making and estimation.
[0062] Through the multi-level and multi-space information complementation and optimal combination processing of UWB and visual sensors, a consistent interpretation of the observed environment is finally produced. In this process, it is necessary to make full use of multi-source data for reasonable control and use, and the ultimate goal of information fusion is to derive more useful information based on the separate observation information obtained by each sensor, through multi-level and multi-faceted c...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More