

Simple-pendulum differential underwater amphibious robot with deformability
A robot and differential technology, applied to underwater ships, underwater operating equipment, motor vehicles, etc., can solve problems such as low efficiency, poor movement flexibility and poor control convenience
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0025] The technical solutions in the embodiments of the present invention will be described clearly and in detail below with reference to the drawings in the embodiments of the present invention. The described embodiments are only some of the embodiments of the invention.
[0026] Technical scheme of the present invention is as follows:
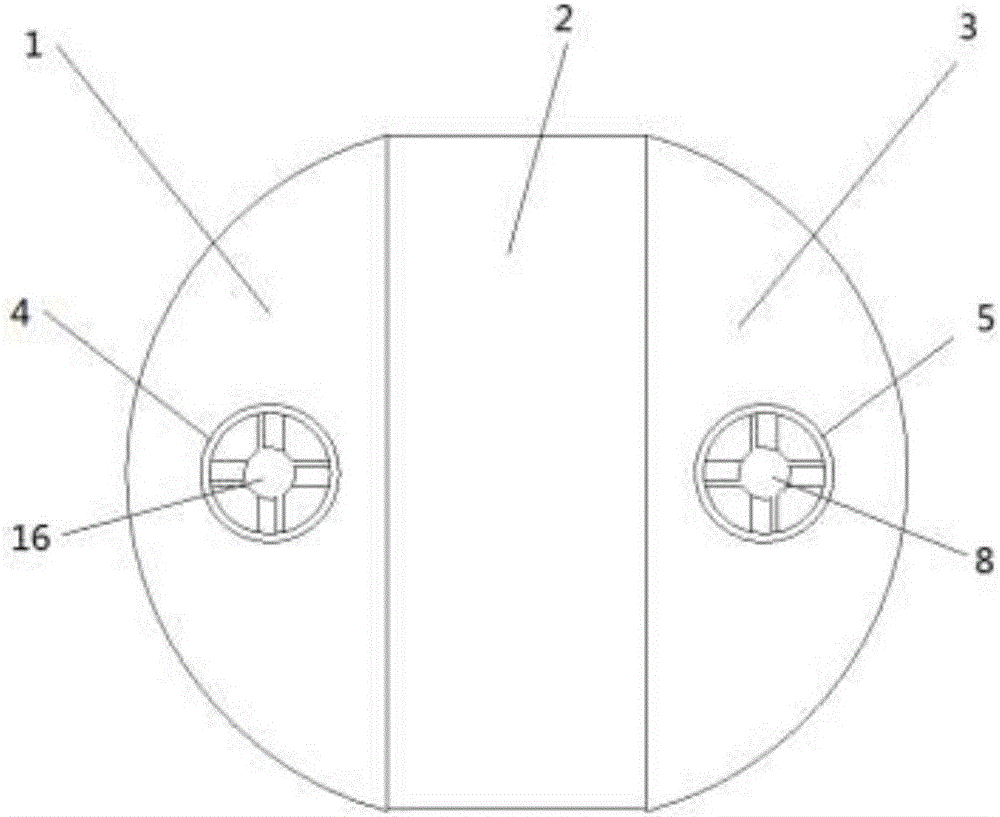
[0027] figure 1 The schematic diagram of the appearance of the invented robot: it can be seen from the figure that the left duct 4 passes through the left hemispherical shell 1, the right duct 5 passes through the right hemispherical shell 3, the left propeller 16 is installed in the middle of the left duct 4, and the right propeller 8 Installed in the middle of the right conduit 5; the left hemispherical shell 1, the cylindrical rubber shell 2 and the right hemispherical shell 3 are butted and assembled together. The entire shape is approximately ellipsoidal. This airtight structure can well protect the internal components of the robot fro...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More