

A control system, method and device for an autonomous mobile robot platform
An autonomous movement and control system technology, which is applied in the field of intelligent robots, can solve the problems that the positioning accuracy and movement accuracy of robots need to be improved, and achieve the effect of flexible planar movement ability and guaranteed positioning accuracy and movement accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0036] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be further described in detail below in conjunction with the accompanying drawings.
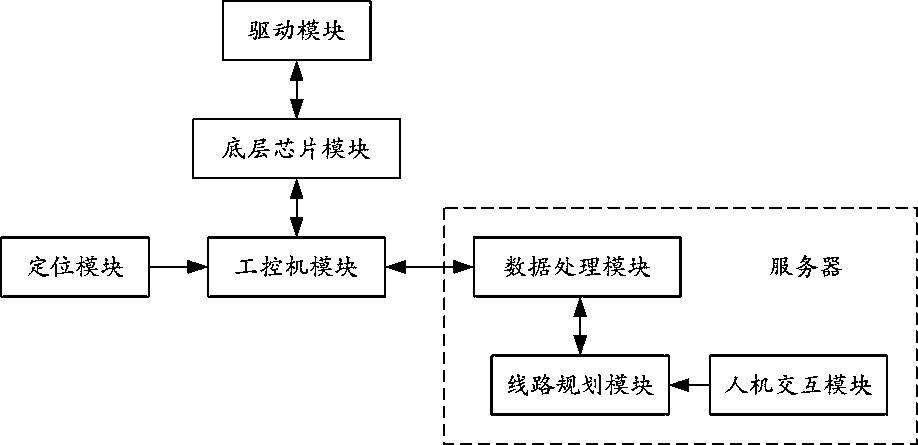
[0037] refer to figure 1 The schematic diagram of the structure is shown.
[0038] A control system for an autonomous mobile robot platform according to an embodiment of the present invention includes a robot platform and a server, the robot platform includes a drive module, a positioning module, a bottom chip module, and an industrial computer module, and the server includes a human-computer interaction module, Data processing module and line planning module.
[0039] The drive modules are used to drive the robot platform to move, and are arranged in three groups at the bottom of the robot platform at equal intervals along the circumferential direction.
[0040] The driver module is connected to the server through the bottom chip module and the industrial compu...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More