

Distributed adaptive coordinated control method for multi-manipulator systems
A technology of coordinated control and coordinated controller, applied in the direction of adaptive control, general control system, control/regulation system, etc., to solve parameter uncertainty, improve universality, and improve flexibility.
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach
[0037] In order to further illustrate the technical solution of the present invention, in conjunction with the accompanying drawings, the specific implementation of the present invention is as follows:
[0038] The invention provides a distributed self-adaptive coordination control method of a multi-manipulator system, and the specific steps are as follows:
[0039] The first step is to establish the motion model of the nonlinear multi-manipulator system with uncertain parameters:
[0040] The motion equation of each manipulator system is expressed by a nonlinear Euler-Lagrange equation with uncertain parameters, and its parameters satisfy the properties of boundedness, antisymmetry and parameter linearization. The dynamic model of multi-manipulator system It can be written as the following formula (1):
[0041]
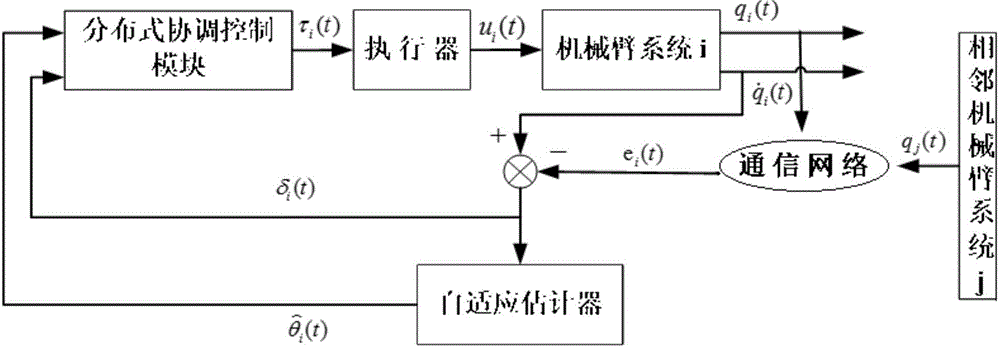
[0042] Among them, τ i (t)∈R m Refers to the control torque of the i-th manipulator system; q i (t)∈R m , and respectively represent the rotation angle, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More