

A spatial index construction method and device for mass point cloud data
A point cloud data and spatial indexing technology, applied in the field of data processing, can solve problems such as occupying a large memory space, difficult to determine the number of leaf node points, and not considering the distribution of data space, so as to improve query efficiency and reduce occupancy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
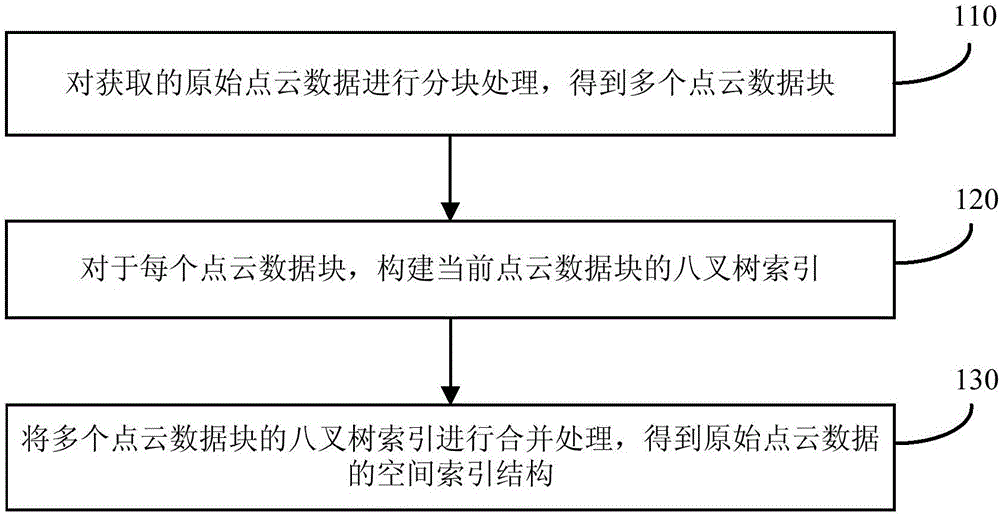
[0025] figure 1 A schematic flowchart of a method for constructing a spatial index of massive point cloud data provided in Embodiment 1 of the present invention, the method can be executed by a device for constructing a spatial index of massive point cloud data, wherein the device can be implemented by software and / or hardware, generally Can be integrated in terminals such as computers. Such as figure 1 As shown, the method includes:
[0026] Step 110, performing block processing on the acquired original point cloud data to obtain multiple point cloud data blocks.
[0027] Exemplarily, the obtained original point cloud data may be divided into blocks according to the operating environment information, and the operating environment information may include memory capacity, etc., where the memory capacity may specifically refer to the available memory capacity of the terminal. For example, the amount of data contained in each point cloud data block can be determined according ...
Embodiment 2
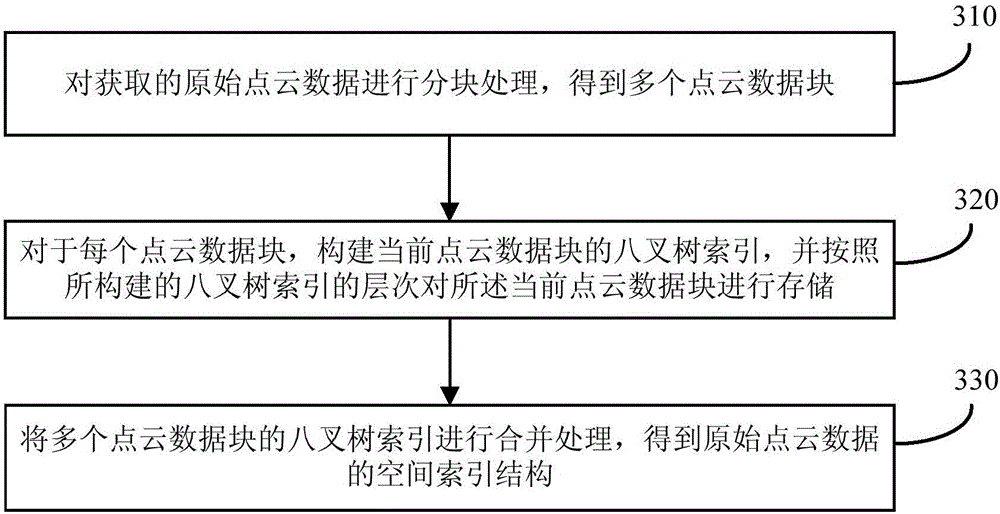
[0036] image 3It is a schematic flowchart of a method for constructing a spatial index of massive point cloud data provided by Embodiment 2 of the present invention. This embodiment is optimized on the basis of the above-mentioned embodiment. In this embodiment, the step "for each point cloud data block, construct the octree index of the current point cloud data block" is optimized as follows: for each point cloud data block, construct the octree index of the current point cloud data block, and compare all points according to the level of the constructed octree index The current point cloud data block is stored. Wherein, for the leaf nodes in the current level, store all the unstored data in the bounding box corresponding to the leaf nodes in the current level, and for the non-leaf nodes in the current level, randomly store all data in the current level according to the preset ratio Part of the bounding box corresponding to the non-leaf node has no data stored, and the sum o...
Embodiment 3
[0048] Figure 5 It is a schematic flowchart of a method for constructing a spatial index of massive point cloud data provided by Embodiment 3 of the present invention. This embodiment is optimized on the basis of the above embodiments. In this embodiment, multiple point cloud data blocks are combined After the octree index is merged and the spatial index structure of the original point cloud data is obtained, a step is added: based on the Levels of Detail (LOD) technology, according to the distance from the current viewpoint to the target point, the space of the original point cloud data is The corresponding data is scheduled for display in the index structure.
[0049] Correspondingly, the method of this embodiment includes the following steps:
[0050] Step 510, performing block processing on the acquired original point cloud data to obtain multiple point cloud data blocks.
[0051] Step 520, for each point cloud data block, construct an octree index of the current point ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More