

Robot grinding system for solving deformation problem and track planning method of robot grinding system
A robot and grinding technology, applied in the direction of grinding drive device, grinding machine parts, grinding/polishing equipment, etc., can solve the problem of low cost, without considering the difference of robot grinding angle and feed speed, without considering Problems such as robot workpiece assembly errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0042] The present invention will be described in detail below in conjunction with the accompanying drawings and specific embodiments.
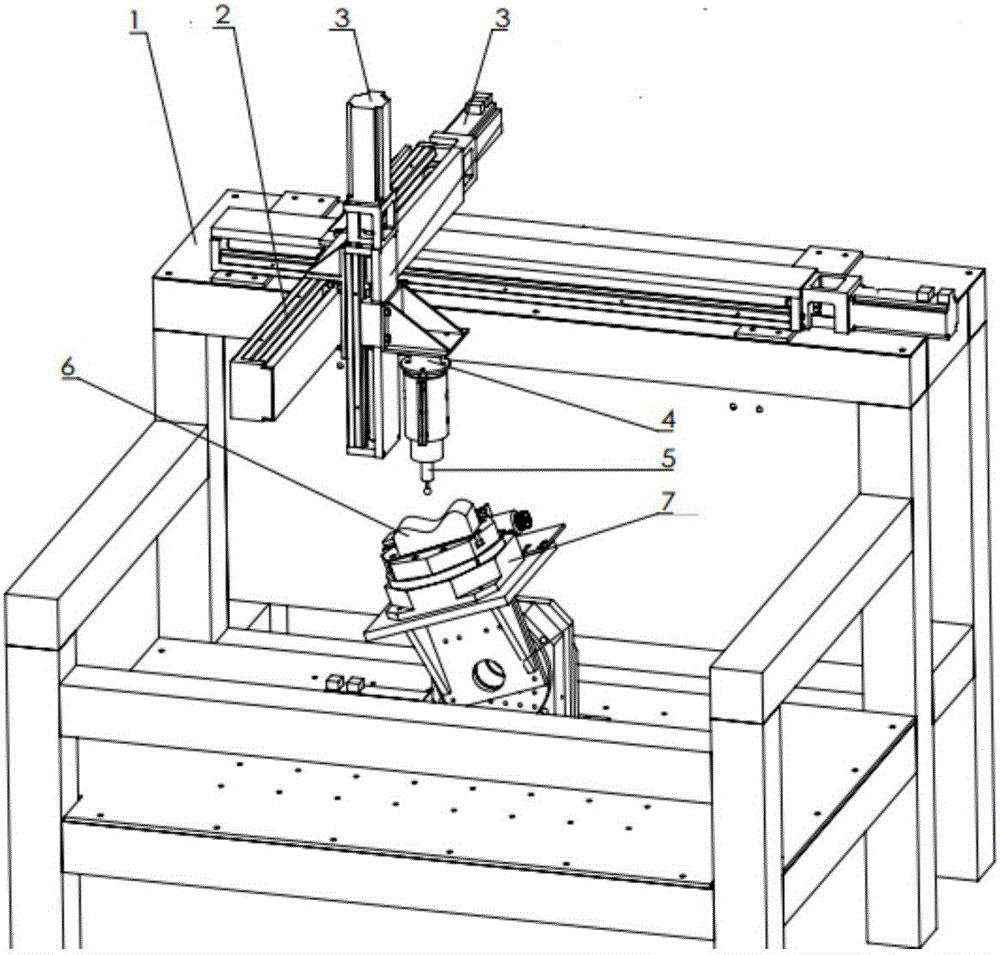
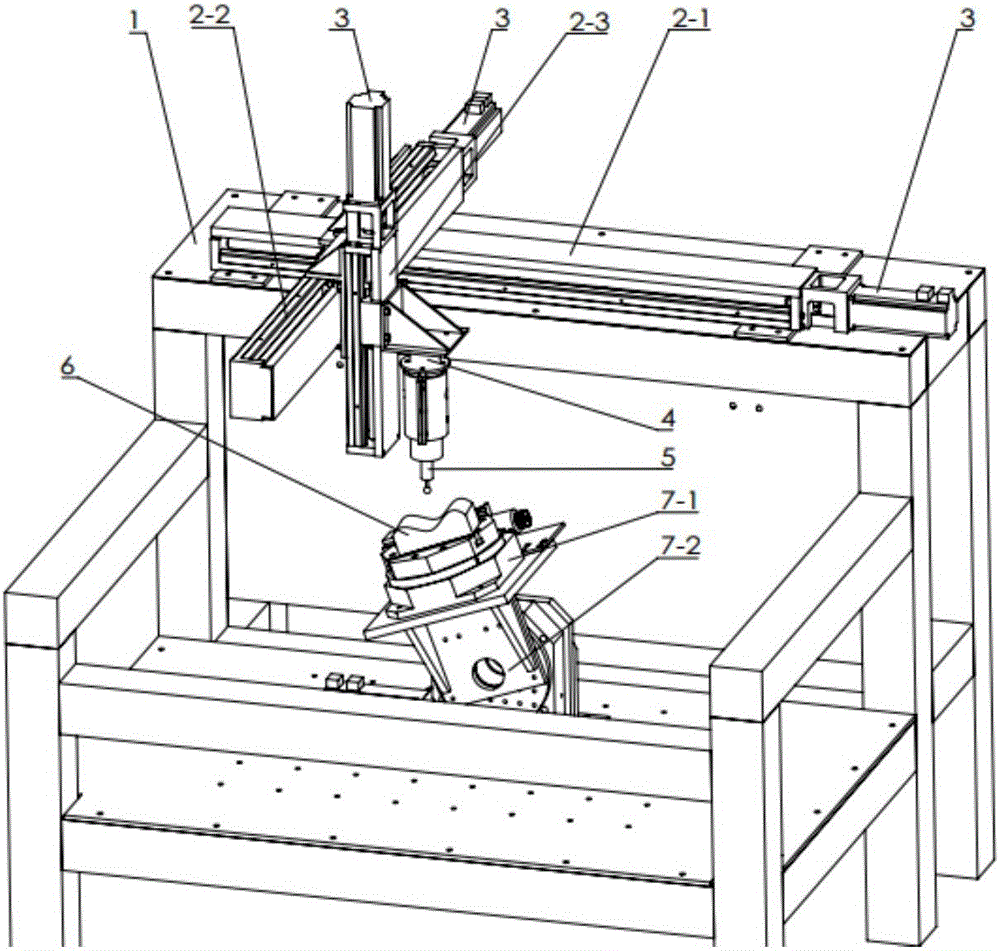
[0043] A robotic grinding system that addresses deformation problems such as figure 1 and figure 2As shown, the system is a Cartesian coordinate robot grinding system. The Cartesian coordinate robot grinding system includes a workbench 1, a three-axis Cartesian robot guide unit 2, a drive unit 3, a six-dimensional force sensor measurement unit 4, and a grinding tool 5. The curved surface workpiece 6, the Cartesian coordinate robot grinding system also includes a two-axis rotating work platform 7 for installing the curved surface workpiece 6, a deformation calculation module and an interpolation point optimization module; the guide unit 2 is arranged on the workbench 1 Driven by the drive unit 3, the six-dimensional force sensor measurement unit 4 and the grinding tool 5 are installed at the end of the three-axis Cartesian robot guide unit 2...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More