

An adaptive multi-legged underwater robot for offshore oil development
A technology of underwater robots and offshore oil, applied in underwater operation equipment, transportation and packaging, ships, etc., can solve problems such as difficulty in normal work, achieve the effects of reducing times, increasing work efficiency, and long underwater working hours
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] The present invention will be further described below in conjunction with accompanying drawing:
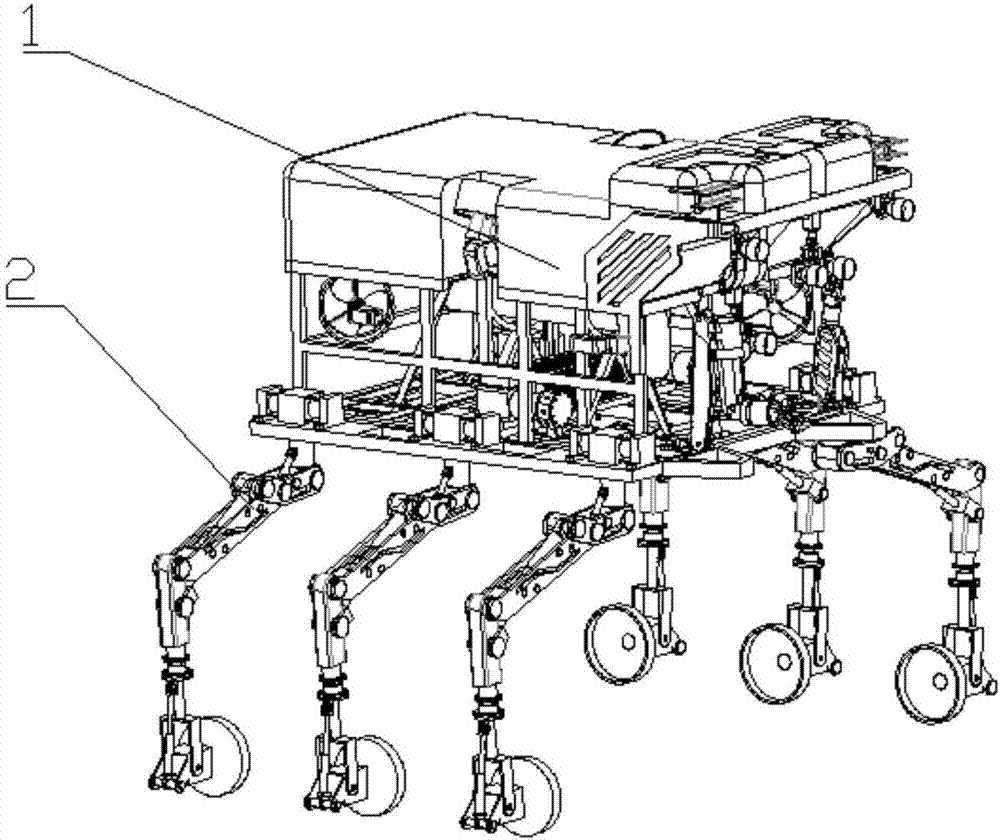
[0036] Such as Figure 1 to Figure 21 As shown, the self-adaptive multi-legged underwater robot developed by Offshore Oil includes the body, and hydraulic and electronic control systems that provide power and control signals for the body. The body is composed of two parts: the ROV body and the multi-legged mechanism.
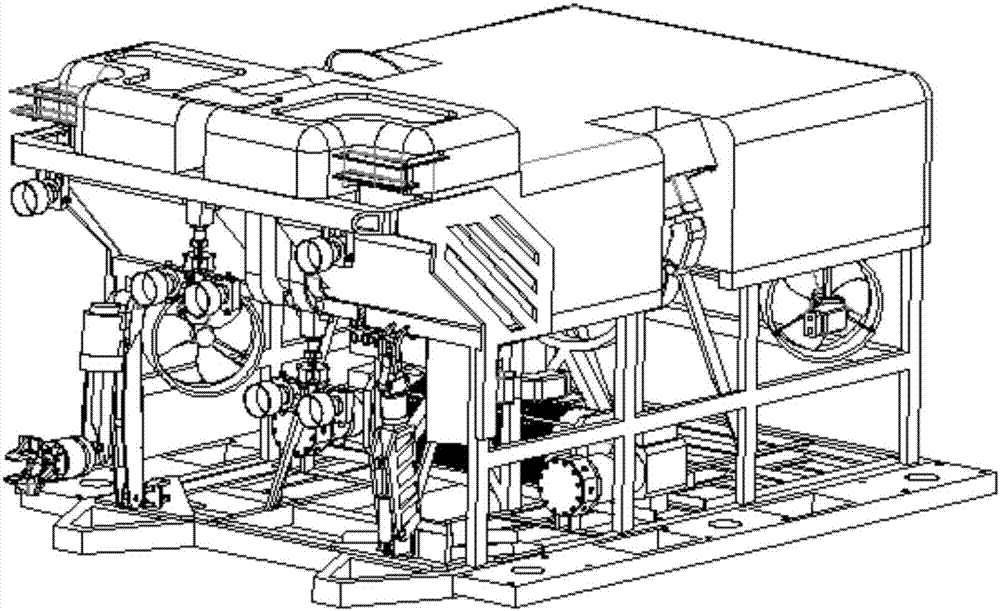
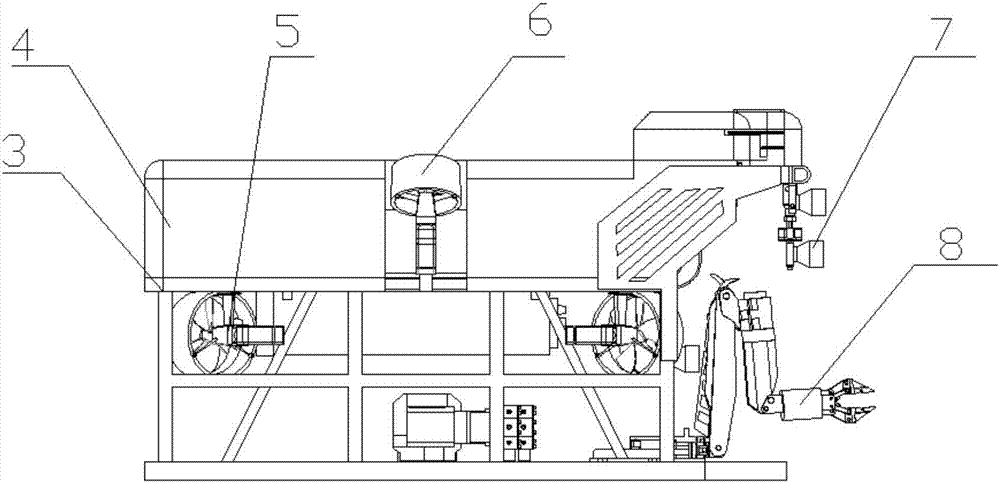
[0037] The ROV body is the carrier of the whole system. When the present invention is applied, a common ROV body can be used. Mainly consists of the ROV body 1 as the carrier of the entire system, such as figure 2As shown, it mainly consists of a carrier frame 3, a buoyancy module 4, 4 horizontal thrusters 6, 2 vertical thrusters 5, a lighting and camera system 7, a 5-degree-of-freedom manipulator 9 and a 7-degree-of-freedom manipulator 8, an electronic cabin 10, The hydraulic power unit 11 is composed. Among them, the carrier frame 3 is not only the main...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More