

A Depth Adaptive Global Sliding Mode Control Method for Underactuated Uuv with Uncertain Time-varying Delay
A time-varying time-delay, control method technology, applied in altitude or depth control, non-electric variable control, vehicle position/route/altitude control, etc., can solve the problem of lack of practicability, controller failure, and no consideration of system time delay And other issues
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
specific Embodiment approach 1
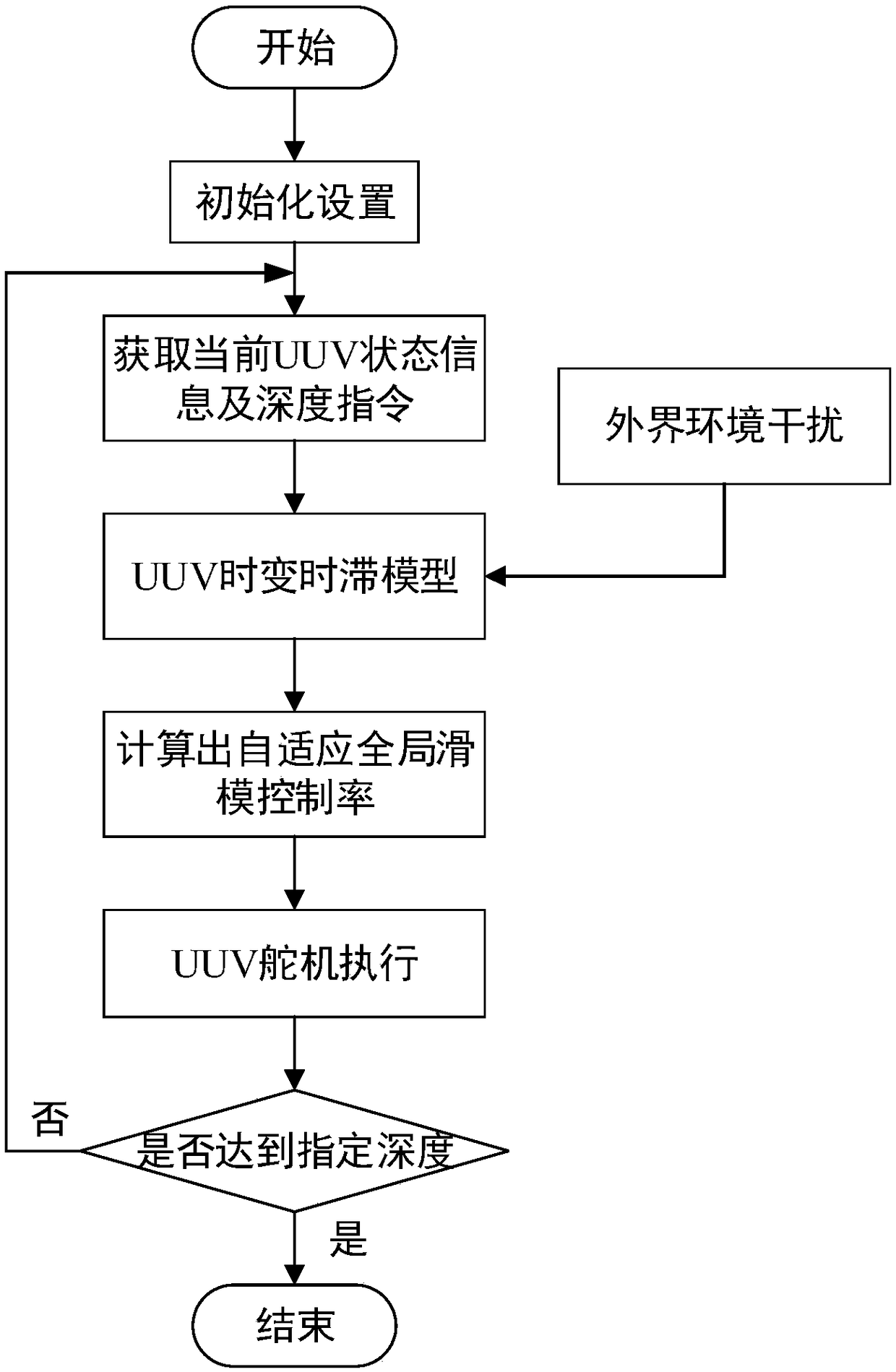
[0035] Specific implementation mode 1: The process of an underactuated UUV depth adaptive global sliding mode control method with uncertain time-varying delay described in this implementation mode is as follows figure 1 The UUV depth control flow chart in the middle is shown as follows:
[0036] Step 1. Detect the current depth z and the UUV’s own data information (pitch angle θ, pitch angular velocity q), and at the same time, according to the current task, the expected depth information z r Down to UUV, get the current state information x=(z e θq) T , where z e is the depth difference, that is, z e =z r -z;
[0037] Step 2, using the current UUV state information x=(z obtained in step 1 e θq) T , the T-S fuzzy time-varying time-delay mathematical model of the underactuated unmanned underwater vehicle UUV;
[0038] According to the external ocean current environment disturbance and system uncertainties, a global sliding mode controller model based on feedback gain i...
specific Embodiment approach 2
[0054] Specific embodiment 2: This embodiment further describes in detail a kind of underactuated UUV depth self-adaptive global sliding mode control method with uncertain time-varying delay described in specific embodiment 1 in conjunction with the accompanying drawings:
[0055] In step two, the process of establishing the mathematical model of the underactuated underwater unmanned vehicle UUV is:
[0056] In the process of UUV diving, the vertical velocity has little effect on its motion and can be ignored, and the influence of horizontal motion can be ignored at the same time, so as to obtain the following mathematical model of UUV vertical motion:
[0057]
[0058] in, f(x,t)=B 0 F(x,t) is the external environment interference and there is an unknown normal constant μ which satisfies ||f(x,t)||≤μ||x(t)||. Let x=(z e θq) T Have
[0059]
[0060] in, δ s To control the rudder angle of the horizontal rudder, I yy is the moment of inertia about the pitch angl...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More