

Kinematics and dynamics solution method of underactuated mechanism with flexible kinematic pairs
A technique of dynamic equations and kinematics, applied in the field of numerical iteration
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
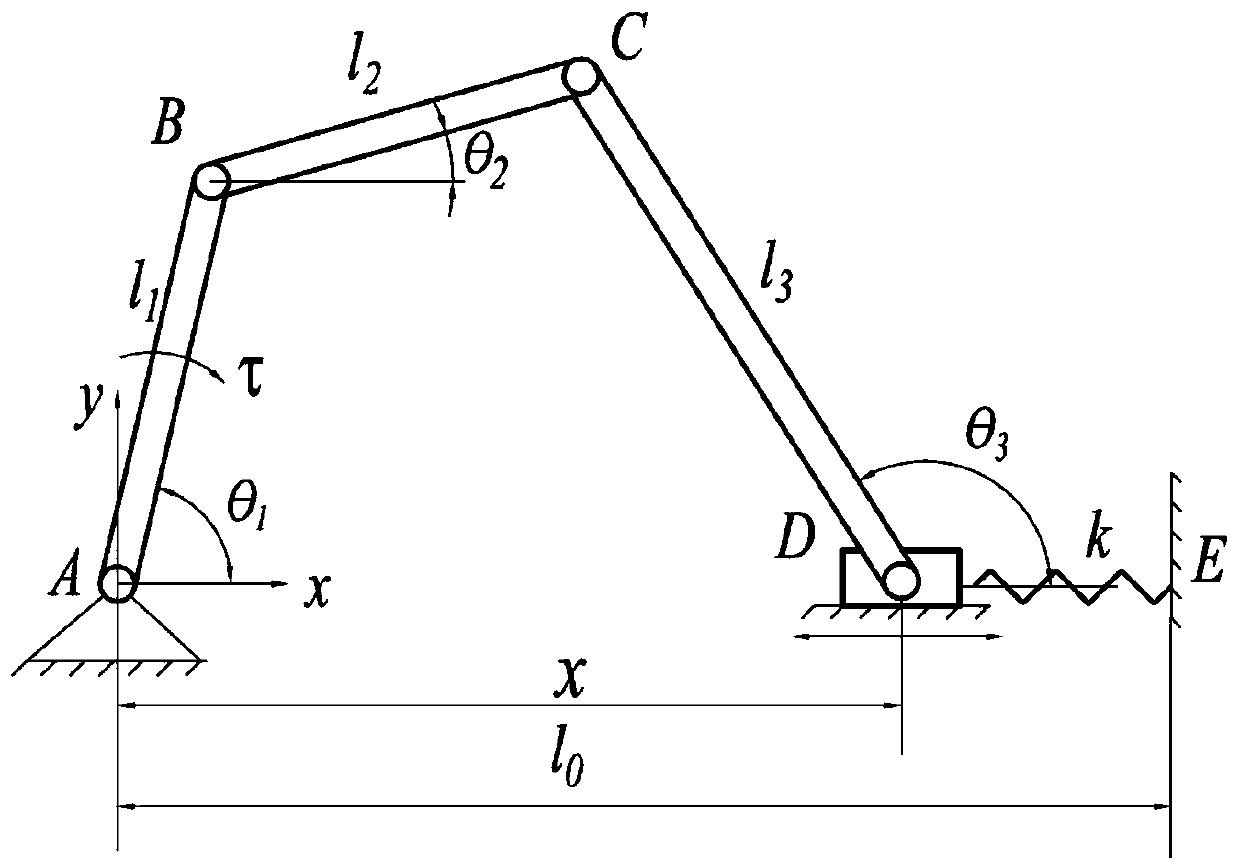
[0073] This embodiment takes the planar two-degree-of-freedom underactuated mechanism with flexible moving pairs as the research object, such as figure 1 As shown, establish the coordinate system of the mechanism, take point A as the coordinate origin, take the line AD as the x-axis, the direction pointing to D is the positive direction of the x-axis, and the vertical x-axis is the positive direction of the y-axis. The parameters of each component of the mechanism See Table 1.
[0074] Table 1 Component parameters of the underactuated mechanism with flexible kinematic pairs
[0075]
[0076] Define the mechanism parameters, establish the kinematics and dynamics models of the underactuated mechanism, select the iteration time step as 0.05s, and the number of iterations as 40 times. The specific modeling steps are as follows:
[0077] (2a) Use the closed vector method to establish the kinematic position equation of the mechanism:
[0078]
[0079](2b) Deriving the kinem...
Embodiment 2
[0106] This embodiment takes the underactuated mechanism with three degrees of freedom as the research object, such as Figure 6 As shown, establish the coordinate system of the mechanism, take point A as the coordinate origin, take the line AD as the x-axis, the direction pointing to D is the positive direction of the x-axis, the vertical x-axis is the positive direction of the y-axis, and the AB rod and BC rods are all moving parts. The solution process is the same as in Example 1.
[0107] What is not mentioned in the present invention is applicable to the prior art.
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More