

Bidirectional-spaced flexible fin-leg promoting device
A bi-directional limit and propulsion device technology, applied in the field of mobile robots, can solve problems such as low propulsion efficiency and high noise, and achieve the effect of increasing load capacity
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0018] In order to make the object, technical solution and advantages of the present invention clearer, the present invention will be described in further detail below in conjunction with specific embodiments and with reference to the accompanying drawings.
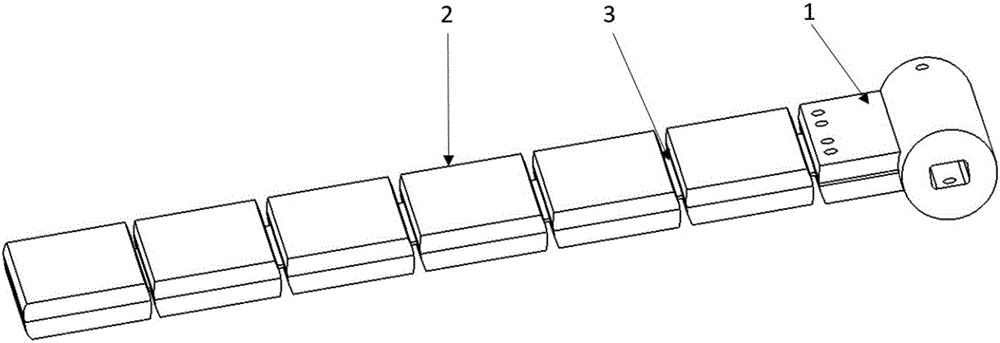
[0019] figure 1 It is a structural schematic diagram of the two-way limiting flexible fin-leg propulsion device of the present invention, such as figure 1 As shown, the two-way limiting flexible fin-leg propulsion device includes: a drive coupling module 1, a limiting block 2, and an elastic plate 3, wherein:
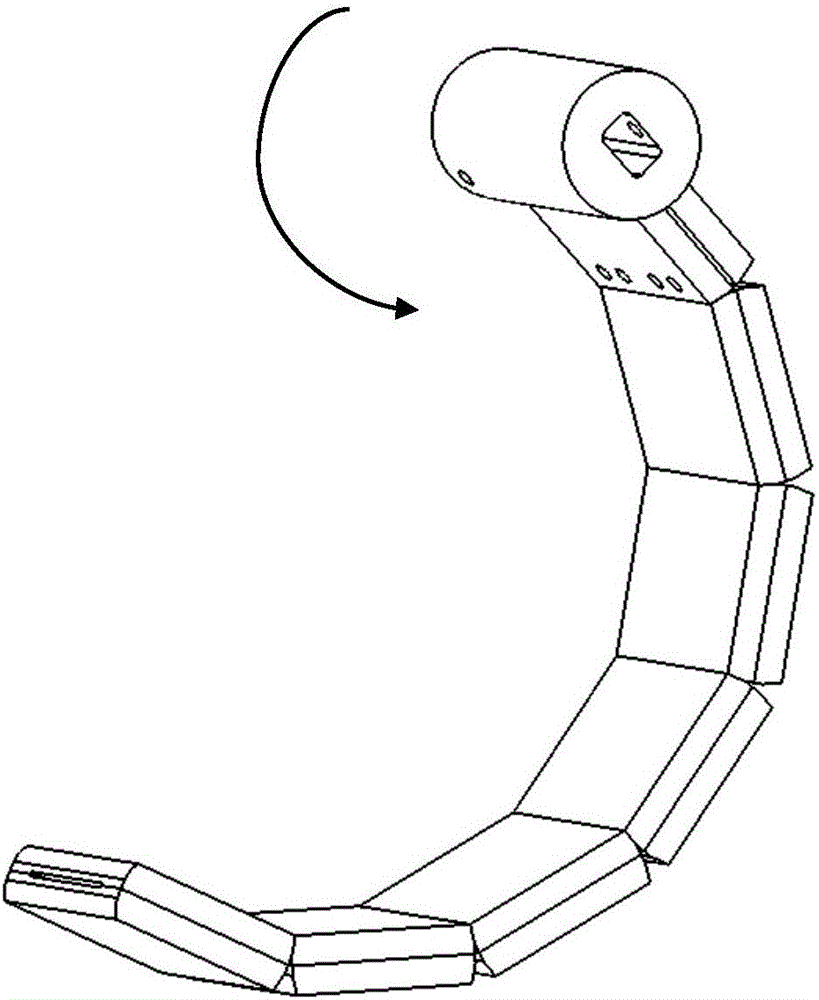
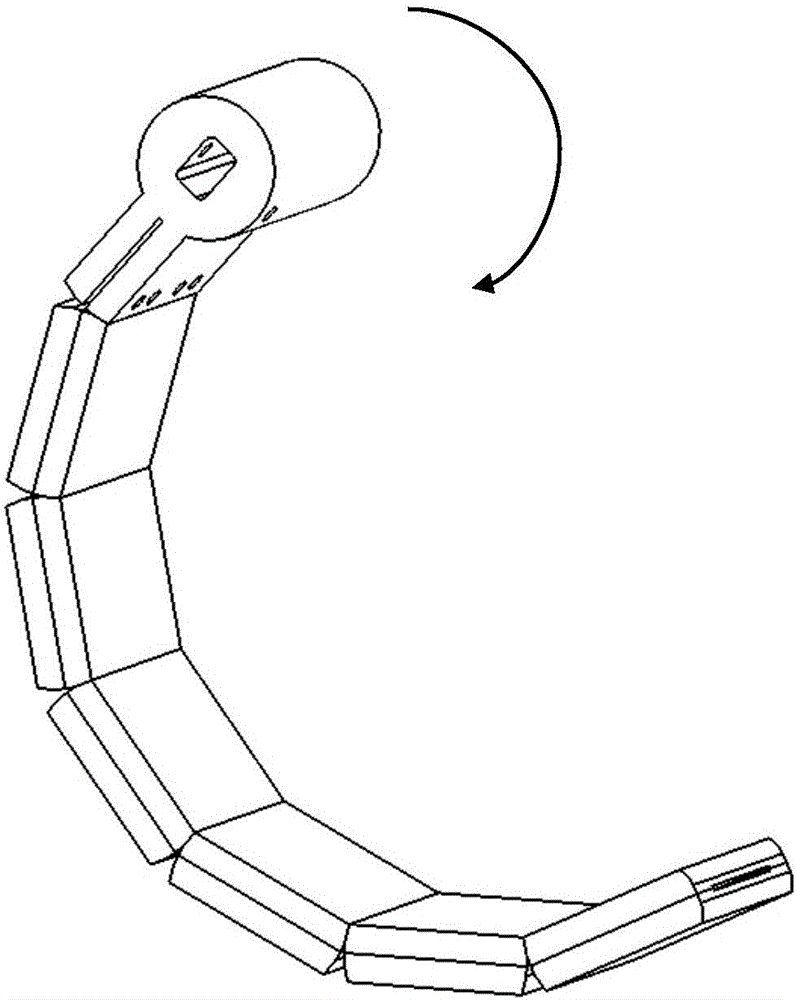
[0020] The driving coupling module 1 of the propulsion device can perform rotation coupling and swing coupling according to the propulsion requirements. When propelling on land and in transitional areas, the robot adopts the corresponding gait to propel, and at this time, the module is required to achieve rotational connection. When propelling underwater, the robot adopts fin-type swing propulsion, and the module...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More