

A method for detecting and processing glass edge touch of a swinging window cleaning robot
A glass edge and robot technology, which is applied in the cleaning of instruments, motor vehicles, windows, etc., can solve the problem of descriptive analysis; the robot of Beihang University, unsuitable for household window cleaning conditions, complex structure and other problems, can reduce window cleaning dead Area, swing type window cleaning robot glass edge related processing is flexible, and the effect of solving the problem of downward movement
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image


Examples
Embodiment Construction
[0026] The following is a further description of a glass edge touch detection processing method of a swinging window-cleaning robot in conjunction with the accompanying drawings through a simple example.
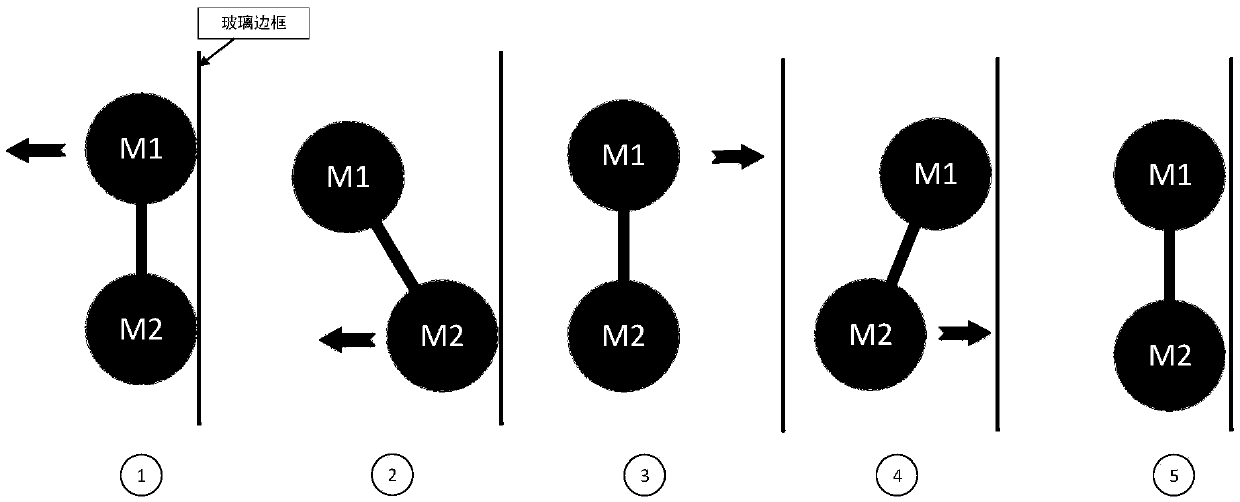
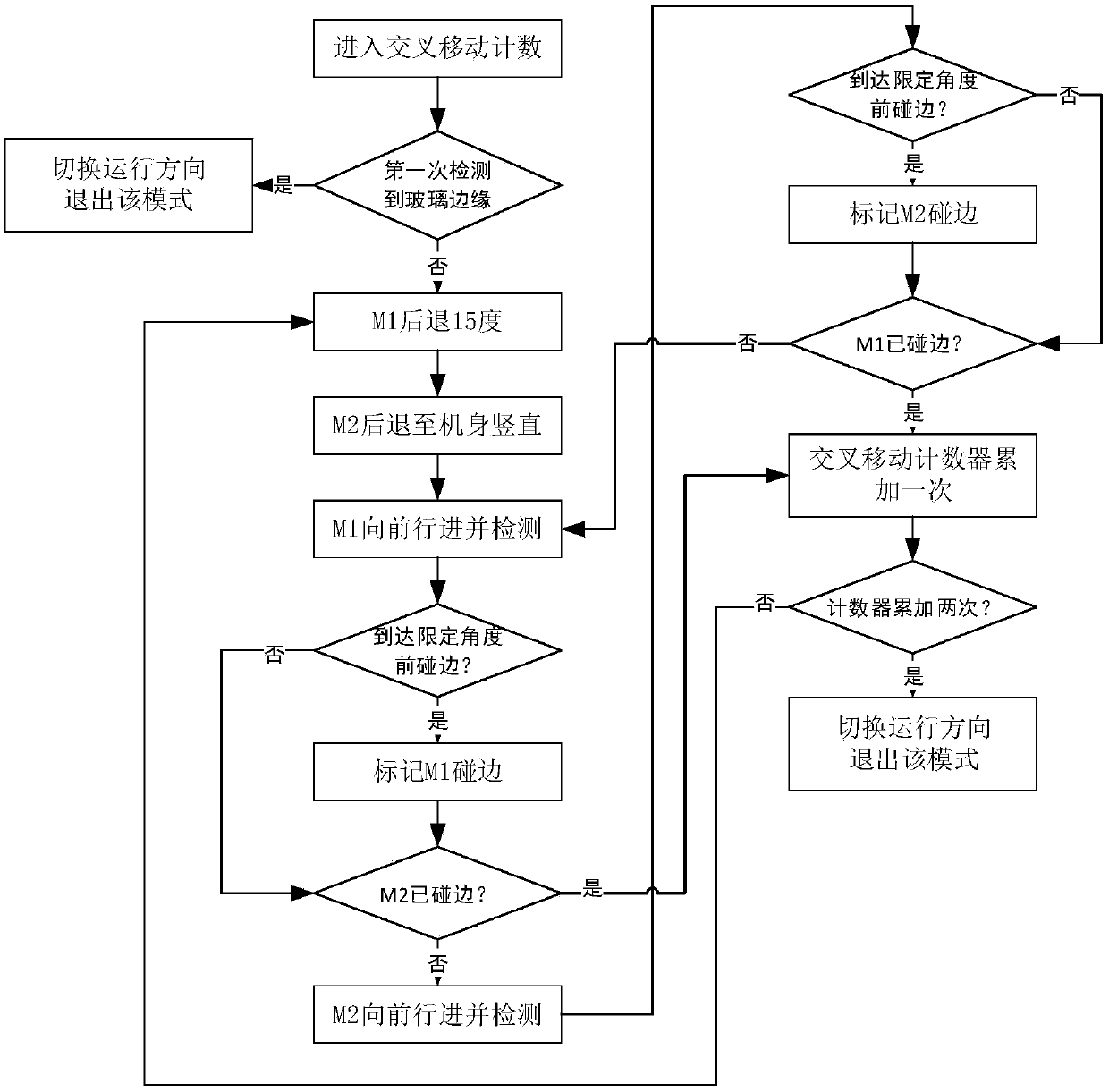
[0027]A glass edge touch detection processing method of a swinging window cleaning robot in the present invention mainly includes the following contents: a fault-tolerant judgment mode is added in the glass edge detection process, and the window cleaning chassis of the window cleaning robot is allowed in the erasing operation process of the swinging window cleaning robot Make a misjudgment on the position of the edge of the glass. Take the first foot M1 as an example. When the first foot M1 is detected to touch the edge of the glass for the first time, the window cleaning robot temporarily judges this place as the edge of the glass. It is also possible here For larger dirt, after that, the window-cleaning robot takes a step back and performs the erasing operation on this plac...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More