

Robot path planning method based on improved genetic algorithm
An improved genetic algorithm and path planning technology, applied in the field of robot path planning based on improved genetic algorithm, can solve the problems of increasing inspection time, vibration, stagnation, etc., and achieve the effect of improving reliability and navigation accuracy
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
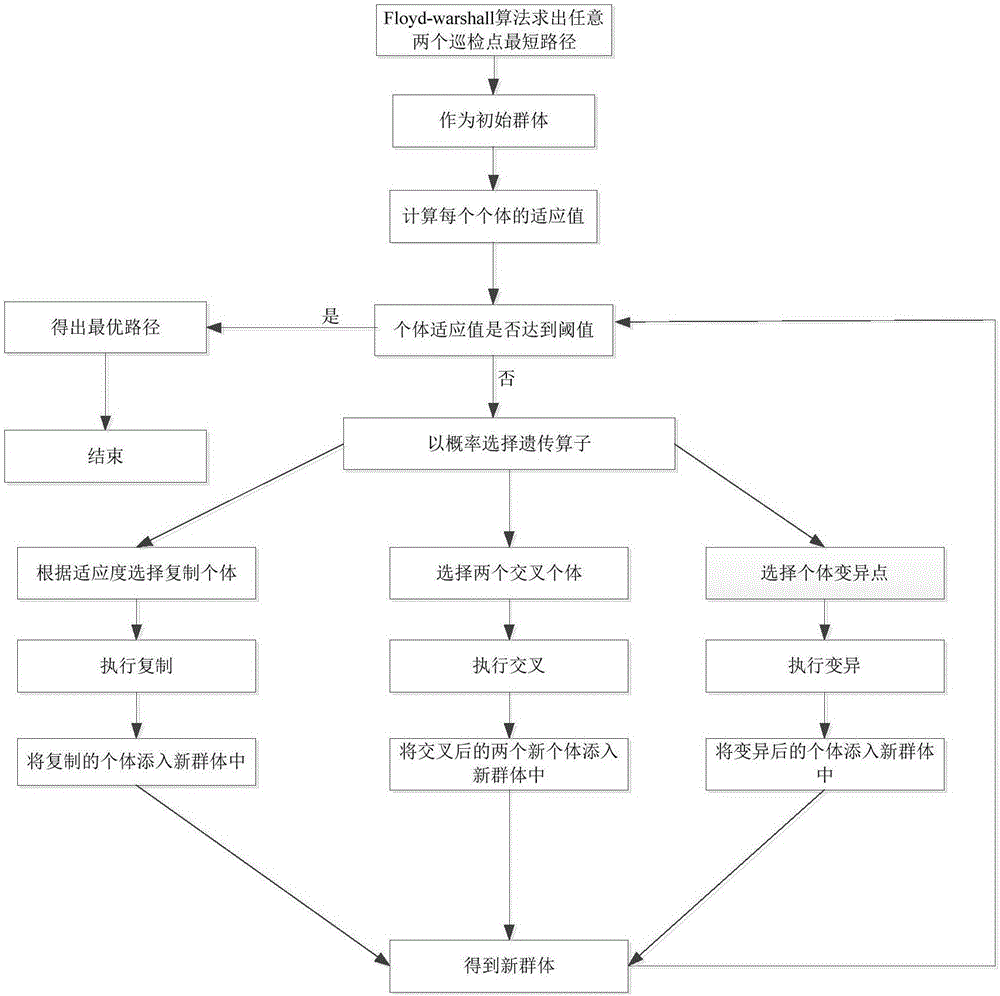
[0015] The robot path planning method provided by the present invention collects all inspection points NODE, and records the position coordinates of all inspection points, connects the required inspection paths, and records all inspection paths EDGE; The inspection point NODE and the inspection path EDGE calculate the shortest path between any two inspection points, and the present invention uses the Floyd-Warshall algorithm to obtain an approximate optimal path between any two inspection points.
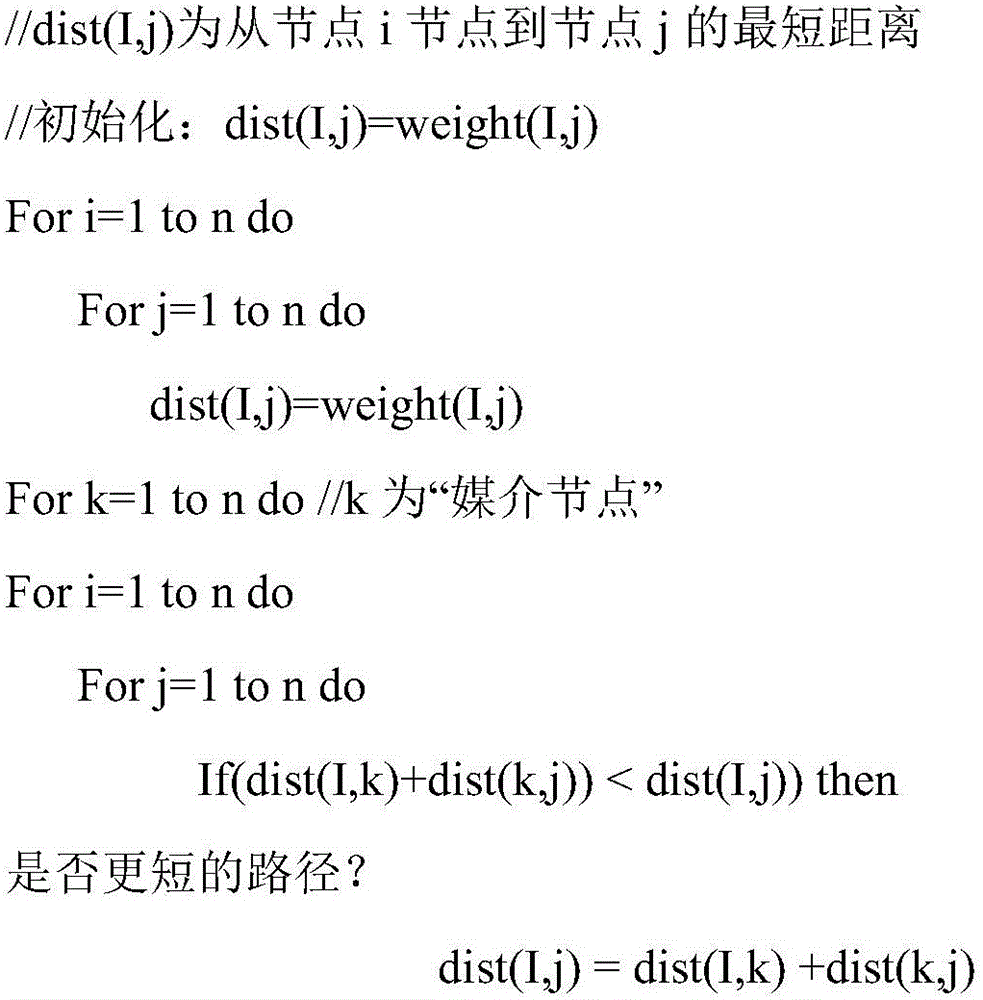
[0016] The floyd-Warshall algorithm is used to find the shortest distance between each pair of points, and the best path is obtained by considering the best subpath. Its pseudo code is as follows:
[0017]
[0018] The present invention also has an optimal path database DB, which records all the optimal paths obtained by the genetic algorithm and is constantly updated. When the robot receives a new inspection task instruction, it first searches the optimal path database DB. If t...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More