

A kind of industrial robot tcp calibration method
An industrial robot and calibration method technology, applied in the field of industrial robot tool coordinate system origin calibration, can solve problems such as unreliable calibration results, and achieve the effects of improving calibration reliability, calculation accuracy, and eliminating errors
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
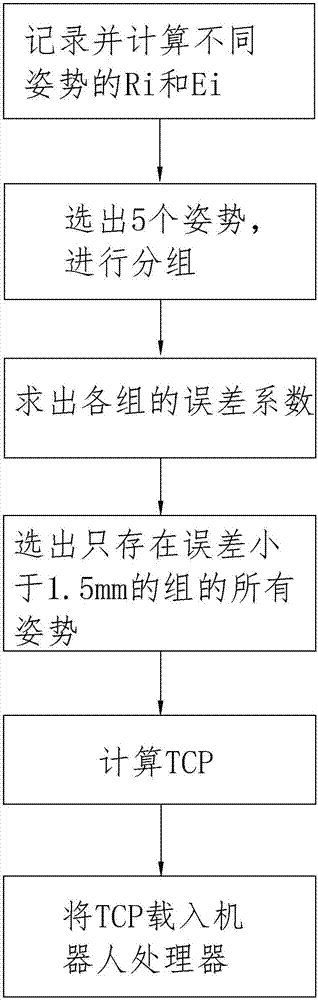
[0033] In order to verify the specific implementation of the present invention, check is carried out on the robot simulation software. The theoretical TCP of the robot tool used for simulation is (2, 0, 402), such as figure 1 The flow chart of the steps shown, the execution steps are roughly as follows:
[0034] 1) Teaching the robot to make the tool to be calibrated touch the tip of a fixed sharp object in the flexible working space of the robot in different postures, record the joint angle coordinates or Cartesian coordinates of each posture, and calculate the flange plate coordinates of the connecting rod end of each posture The attitude matrix R of the system i (i=1, 2..., n) and displacement vector E i (i=1, 2, ..., n);
[0035] Record the joint angle coordinates of the six-axis robot for 5 poses, and get Table 1;
[0036]
[0037] Table 1
[0038] The attitude matrix R of the flange coordinate system at the end of the connecting rod of each attitude can be obtain...
Embodiment 2
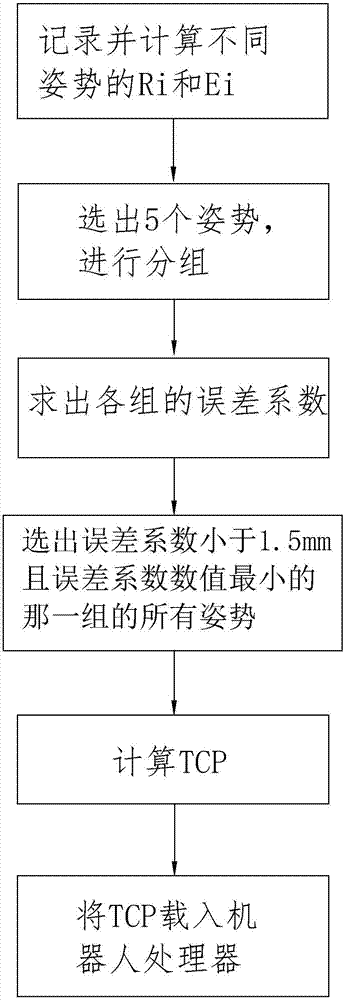
[0069] In order to verify the specific implementation of the present invention, check is carried out on the robot simulation software. The theoretical TCP of the tool for simulating the robot is (2, 0, 402), such as figure 2 The flow chart of the steps shown, the execution steps are roughly as follows:
[0070] 1) The teaching robot makes the origin of the tool coordinate system TCP to be calibrated touch the tip of a fixed pointed object in the flexible workspace of the robot in different postures, records the joint angle coordinates or Cartesian coordinates of each posture, and calculates the end of the connecting rod of each posture The attitude matrix R of the flange coordinate system i (i=1, 2..., n) and displacement vector E i (i=1, 2, ..., n);
[0071] Record the joint angle coordinates of the six-axis robot for 5 postures, and get Table 3;
[0072]
[0073] table 3
[0074] The attitude matrix and displacement vector of the flange coordinate system at the end ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More