

Method of taking over and controlling attitude after space tethered robot captures flexible target satellite
A space tether and control method technology, applied in attitude control, aircraft, motor vehicles, etc., can solve problems such as the limited time control of complexes after capture is not considered
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0035] Now in conjunction with embodiment, accompanying drawing, the present invention will be further described:
[0036] Embodiments of the present invention are realized through the following technical solutions:
[0037] Step 1, establishing the attitude dynamics equation of the complex after the space tethered robot captures the target satellite;
[0038] Step 2, design the inner and outer loop terminal sliding mode controller and the corresponding adaptive law;
[0039] Step 3, take the inner loop control law and the outer loop control law as the input of the control system to carry out the attitude takeover control after the flexible target satellite is captured, and carry out the Lyapunov stability proof;
[0040] Step 4, design a flexible spacecraft vibration suppression controller with a piezoelectric ceramic driver and perform Lyapunov stability proof.
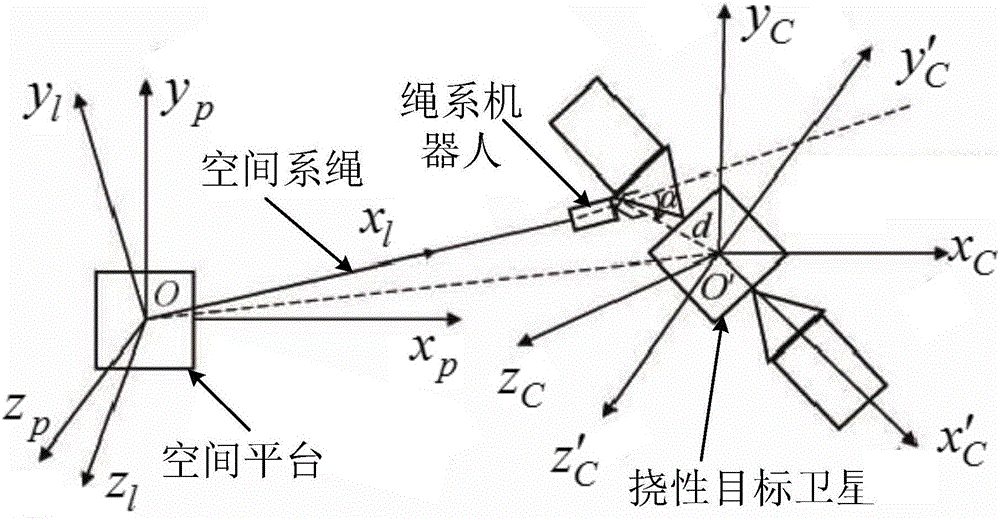
[0041] 1. As described in step 1, attach figure 1 It is a schematic diagram of the target capture by the space...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More