

Door positioning method under home environment based on binocular vision target detection
A technology of binocular vision and home environment, which is applied in the field of robot vision, can solve the problems of high price, achieve flexible practical use, reduce hardware costs, and have wide application prospects
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0089] The preferred embodiments of the present invention will be described below in conjunction with the accompanying drawings. It should be understood that the preferred embodiments described here are only used to illustrate and explain the present invention, and are not intended to limit the present invention.
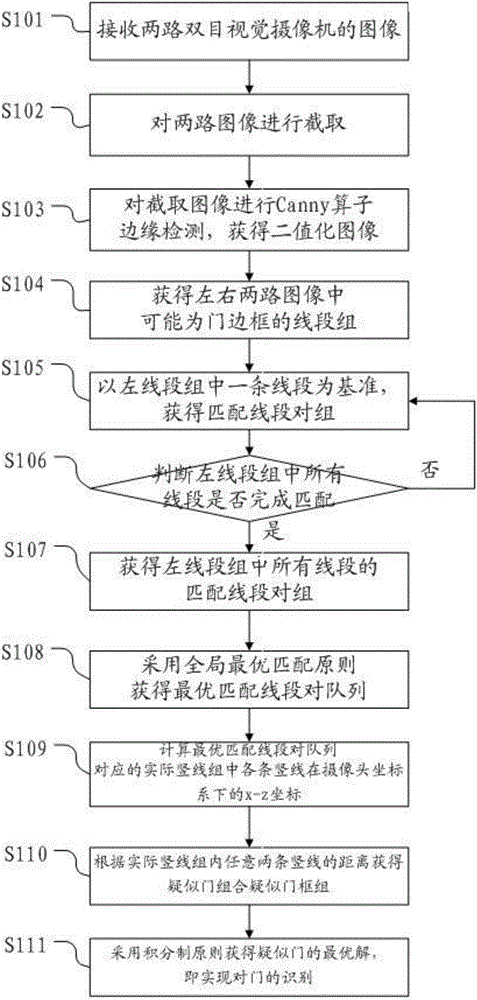
[0090] Such as Figure 1 to Figure 5 As shown, the process includes the following steps:
[0091] S101, the binocular vision camera (left camera and right camera) is placed on the support of a certain height from the ground, placed horizontally, receiving the image I from the two-way binocular vision camera L , I R ;
[0092] S102. Taking the principal points of the respective images of the left camera and the right camera as the center, intercept the image I respectively L The middle coordinates are The rectangular area and image I R The middle coordinates are The rectangular area of (y up and y down is the upper threshold and lower threshold of the i...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More