

Linkage type telescopic arm
A telescopic arm and linkage technology, applied in the direction of claw arms, manipulators, manufacturing tools, etc., can solve the problems of high requirements for pull ropes, reduced stability, easy shaking of pull ropes, etc., and achieve small size, light weight, and structure compact effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment 1
[0045] Such as Figure 1-5 Shown is a schematic diagram of the structure of the outer sleeve of each layer of this embodiment and a schematic diagram of the overall structure after assembly. The structure of this embodiment will be described in layers below.
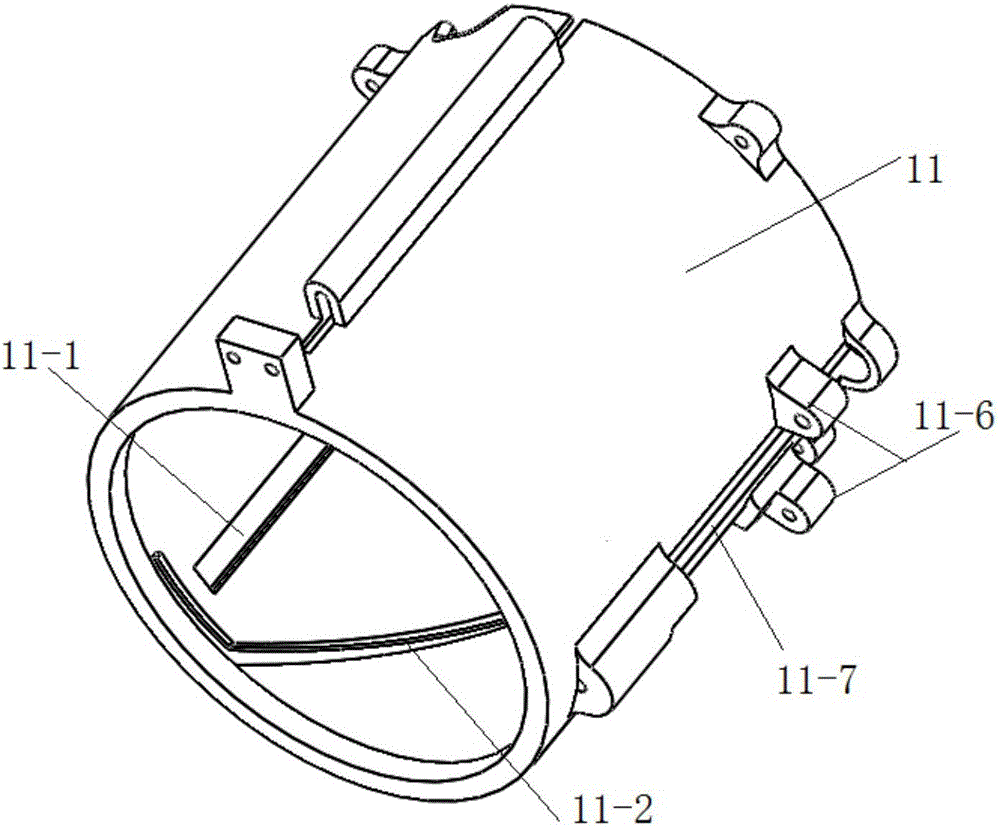
[0046] Such as figure 1 Shown is a schematic structural view of the first layer of the outer sleeve 11 (fixed sleeve) of the present embodiment, combined with Figure 5 , the outer wall of the outer sleeve 11 of the first layer is provided with a motor mount 11-6, the motor 11-5 is installed on the motor mount 11-6, and the output shaft of the motor 11-5 is connected with the pinion 11-4. The outer wall of the first outer cylinder 11 is provided with a through long slot 11-7, and a gear bar 11-3 is installed in the long slot 11-7, and the gear bar 11-3 meshes with the pinion 11-4. The inner wall of the first layer of outer sleeve 11 is axially provided with a first linear groove 11-1 and a first helical groove 11-2. T...
Embodiment 2
[0061] Such as Figure 6-12 Shown is a schematic diagram of the structure of the outer sleeve of each layer of this embodiment and a schematic diagram of the overall structure after assembly. The structure of this embodiment will be described in layers below.
[0062] Such as Figure 6 Shown is the schematic diagram of the structure of the first layer of outer sleeve 21 (fixed sleeve) in this embodiment, and the inner wall of the first layer of outer sleeve 21 is provided with a first linear groove 21-1 and a first spiral groove 21-1 along the axial direction. 2. The number of the first spiral groove 21-2 matches the number of the second protrusion 22-3 on the second layer of outer sleeve 22, and the number of the first linear groove 21-1 matches the number of the third layer of outer sleeve The quantity of the third insert block two 23-3 on the cylinder is matched. It is preferable that the first linear groove 21-1 and the first helical groove 21-2 are not interfered with e...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More