

Autonomous precision landing system of unmanned aerial vehicle on motion platform and landing method
A motion platform and landing system technology, applied in the field of unmanned aerial vehicles, can solve problems such as inability to calculate accurate position information, unstable vehicle speed, and misrecognition as icons, etc., to increase the recognizable range, increase the recognition angle, and ensure accuracy. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment Construction
[0051] The present invention will be described in detail below in conjunction with the accompanying drawings and embodiments.
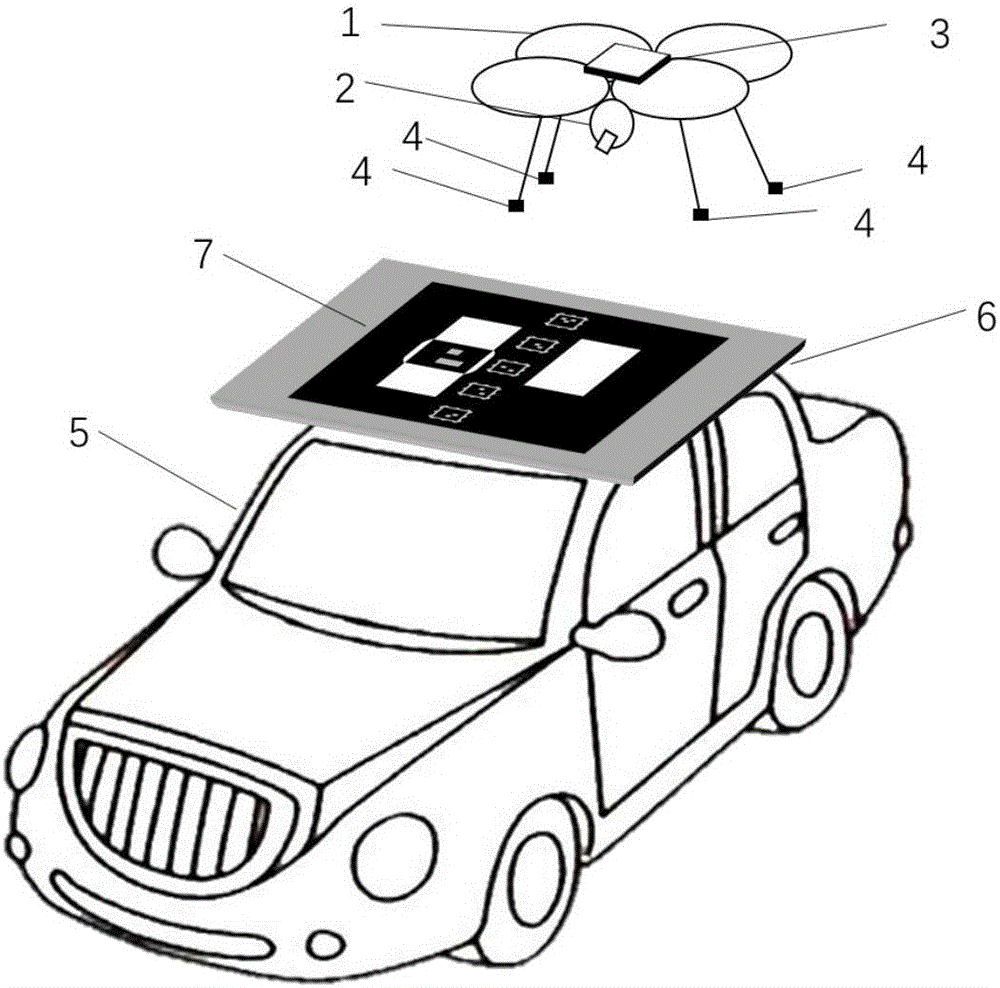
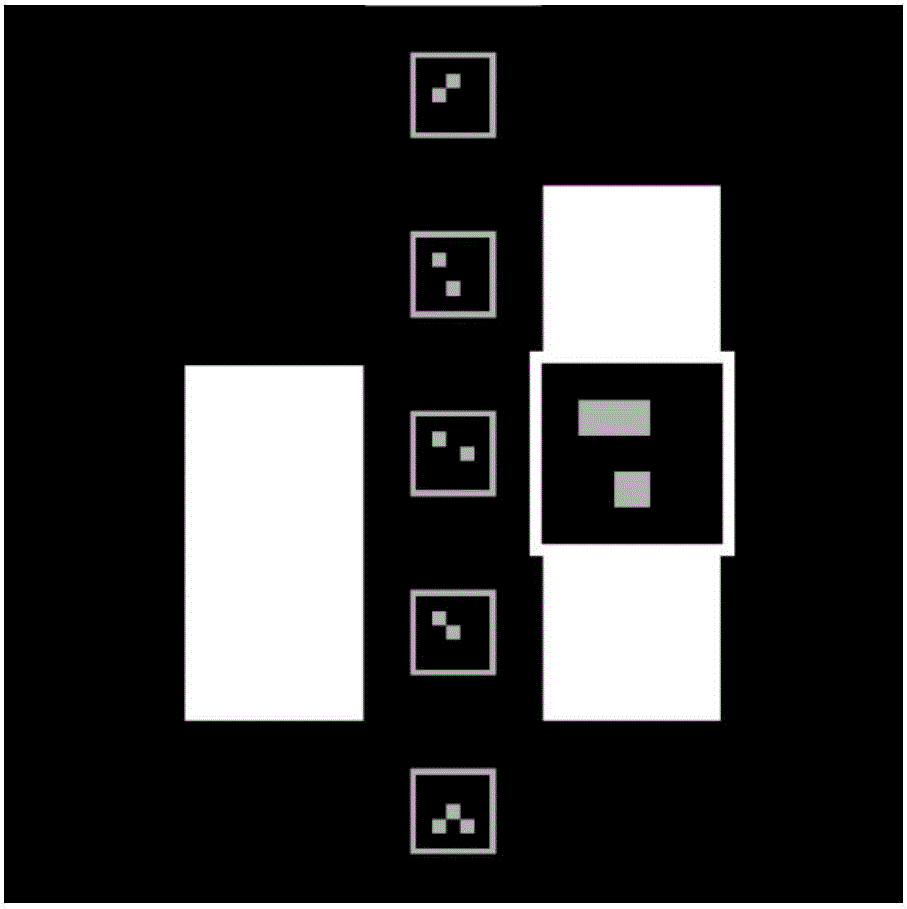
[0052] The present invention designs a specially designed multi-layer nested two-dimensional code identification, and uses the existing pan-tilt camera of the rotor UAV to provide a vision-assisted autonomous landing of the rotor UAV with high precision, good reliability and low cost system, especially for landing on top of moving vehicles. Its system consists of figure 1 As shown, it includes a rotor UAV 1, an airborne pan-tilt camera 2, an on-board computer 3, an airborne landing gear magnetic device 4, a vehicle-mounted iron landing pad 6, and a multi-layer nested logo 7;
[0053] The rotor UAV 1 refers to a complete UAV system, including a UAV, a remote controller (or a ground station), and the UAV consists of a frame, a propeller motor, an electric regulator, a sensor, and a flight controller; wherein Sensors include accelerometer, gyroscope, ...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More