

Visual course identification method based on target point identification
A recognition method and target point technology, applied in character and pattern recognition, image data processing, instruments, etc., can solve problems such as increased cost and inability to guarantee system reliability, and achieve improved accuracy, simple static calibration, and accurate positioning. Effect
- Summary
- Abstract
- Description
- Claims
- Application Information
AI Technical Summary
Problems solved by technology
Method used
Image

Examples
Embodiment
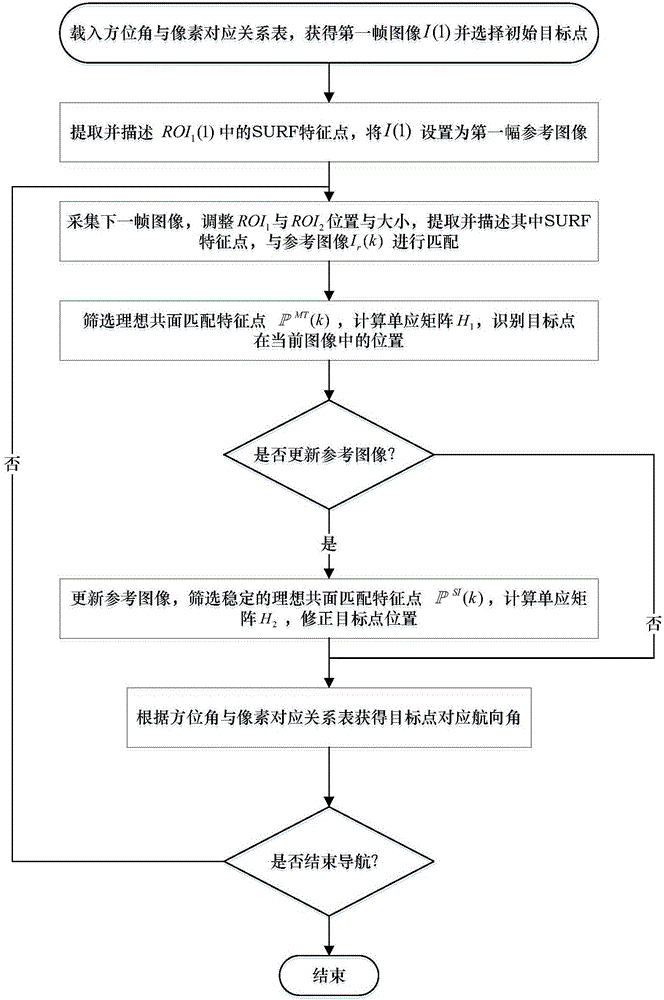
[0087] The invention is a visual heading calculation method based on target point recognition. The method proposes a feature-based target point recognition algorithm, and the visual heading can be accurately and effectively calculated according to the algorithm and camera calibration results. The implementation process of the method is as follows figure 1 As shown, the specific steps are as follows:
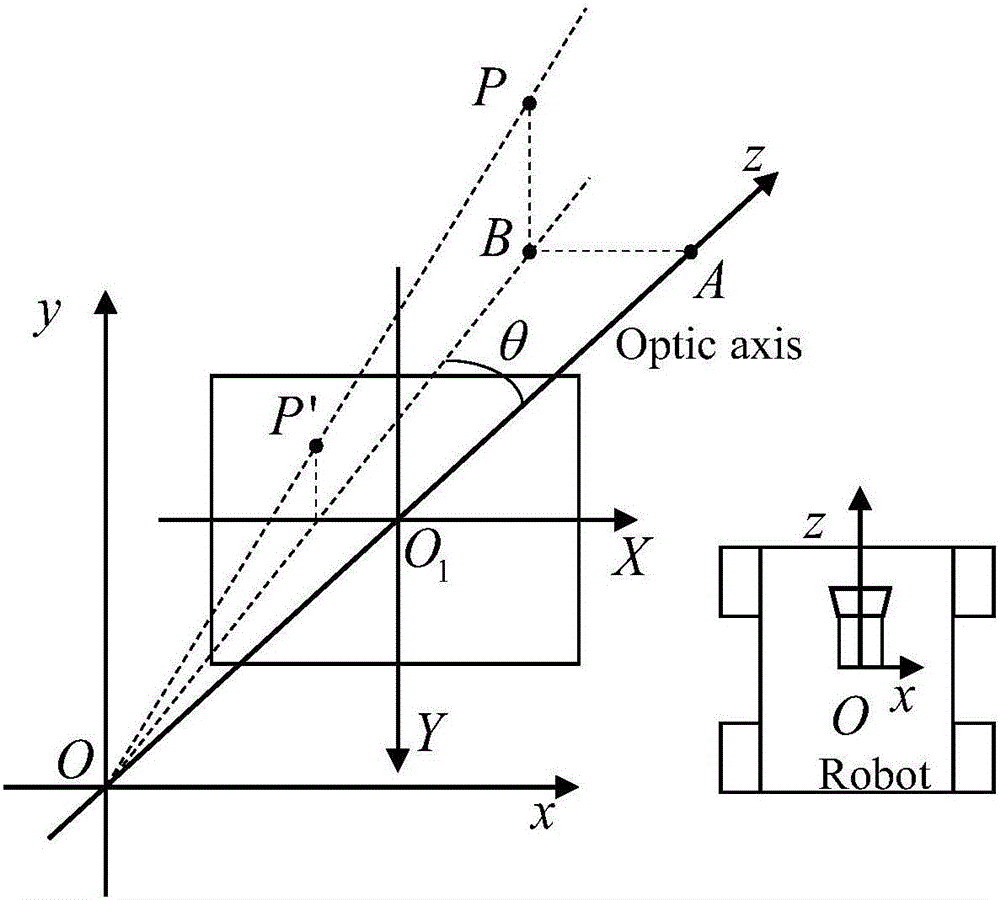
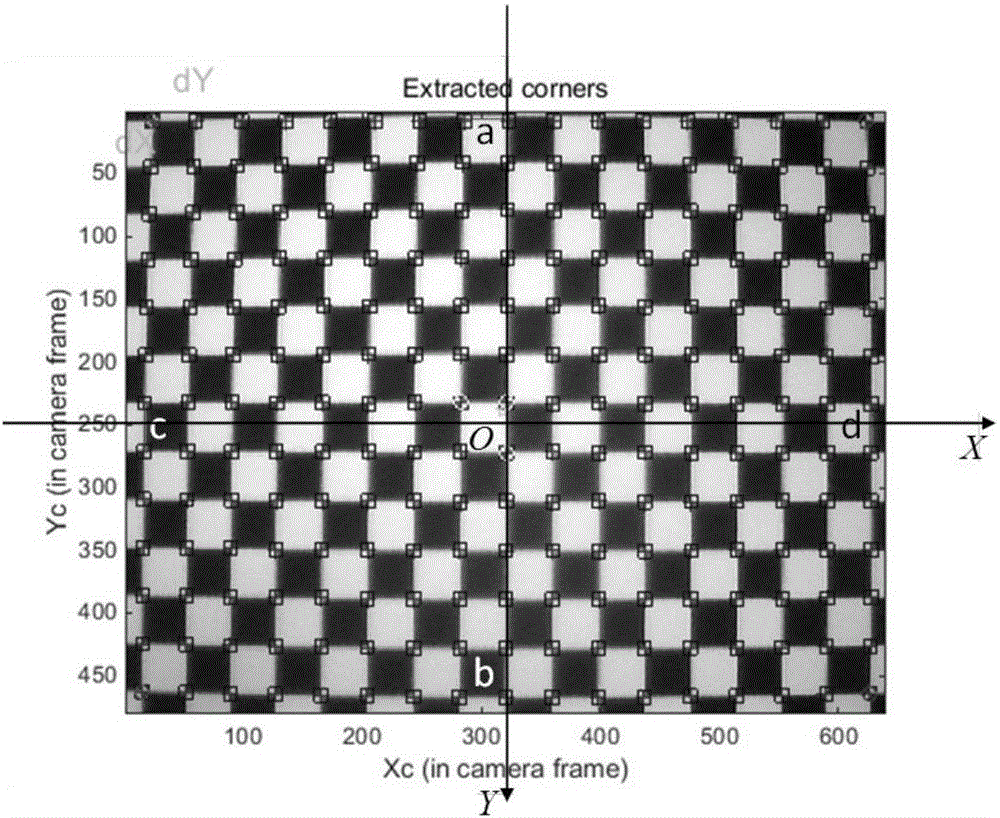
[0088] Step 1: According to such as figure 2 The imaging principle of the linear camera is shown, and the simple static calibration of the low-cost linear camera is carried out by using the checkerboard, and the corresponding relationship between the azimuth and the pixel is obtained, as shown in image 3 Shown is an image of a checkerboard target in the field of view;
[0089] Step 2: Load the azimuth-pixel correspondence table, obtain the first frame image I(1), and select the initial target point in I(1), such as Figure 5 As shown in (a), extract and describe the ROI 1 T...
PUM
 Login to View More
Login to View More Abstract
Description
Claims
Application Information
 Login to View More
Login to View More