Multiple-unmanned-aerial-vehicle cooperated multi-target distribution method
What is AI technical title?
AI technical title is built by PatSnap AI team. It summarizes the technical point description of the patent document.
A distribution method and multi-UAV technology, applied in mechanical equipment, genetic laws, combustion engines, etc., can solve the problems of single construction objective function, damage, incomplete modeling consideration, etc., to ensure population diversity and performance improvement. , the effect of avoiding precocious problems
Active Publication Date: 2017-03-22
THE PLA INFORMATION ENG UNIV
View PDF5 Cites 29 Cited by
Summary
Abstract
Description
Claims
Application Information
AI Technical Summary
This helps you quickly interpret patents by identifying the three key elements:
Problems solved by technology
Method used
Benefits of technology
Problems solved by technology
[0004] In order to overcome the deficiencies in the prior art, the present invention provides a multi-UAV cooperative multi-objective allocation method, which is aimed at the problem of incomplete consideration in the modeling of multi-UAV cooperative multi-objective allocation problems, and relatively simple considerations in the construction of objective functions. The UAV damage cost is added to the flight cost; for the relationship between the UAV and the number of targets, three basic situations are extracted for modeling to make the model close to reality; when the target is assigned, a heuristic genetic algorithm is used to Heuristic information can effectively speed up the execution efficiency of the algorithm and avoid the premature problem of the genetic algorithm
Method used
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
View more
Image
Smart Image Click on the blue labels to locate them in the text.
Viewing Examples
Smart Image
Click on the blue label to locate the original text in one second.
Reading with bidirectional positioning of images and text.
Smart Image
Examples
Experimental program
Comparison scheme
Effect test
Embodiment 1
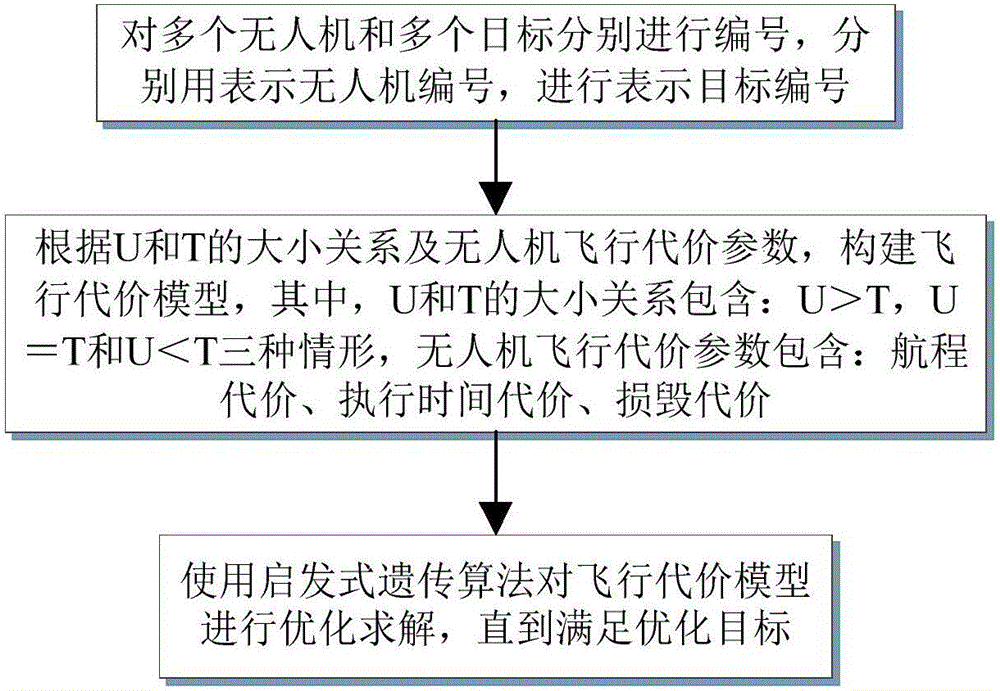
[0048] Embodiment one, see figure 1 As shown, a multi-UAV cooperative multi-target allocation method includes the following steps:
[0049] Step 1. Number multiple drones and multiple targets respectively, use 1, 2, ..., U to represent the drone number, 1, 2, ..., T to represent the target number, where U represents no one The number of machines, T represents the target number;
[0050] Step 2. Construct the flight cost model F(x) according to the size relationship between U and T and the flight cost parameters of the UAV, where the size relationship between U and T includes: U>T, U=T and U<T In some cases, the UAV flight cost parameters include: voyage cost, execution time cost, and damage cost;
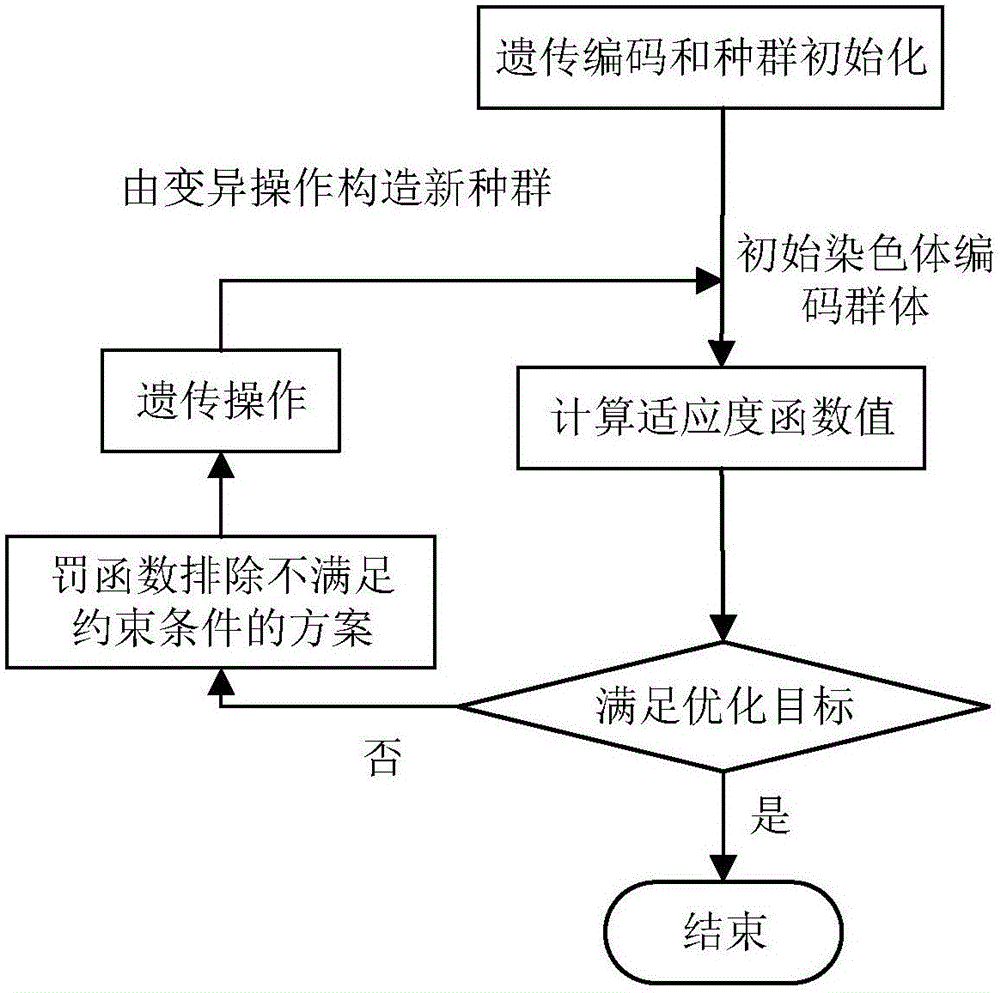
[0051] Step 3. Use the heuristic genetic algorithm to optimize and solve the flight cost model until the optimization objective is met.
[0052] In the process of modeling, the present invention analyzes the quantitative relationship between the drone and the target, and consider...
Embodiment 2
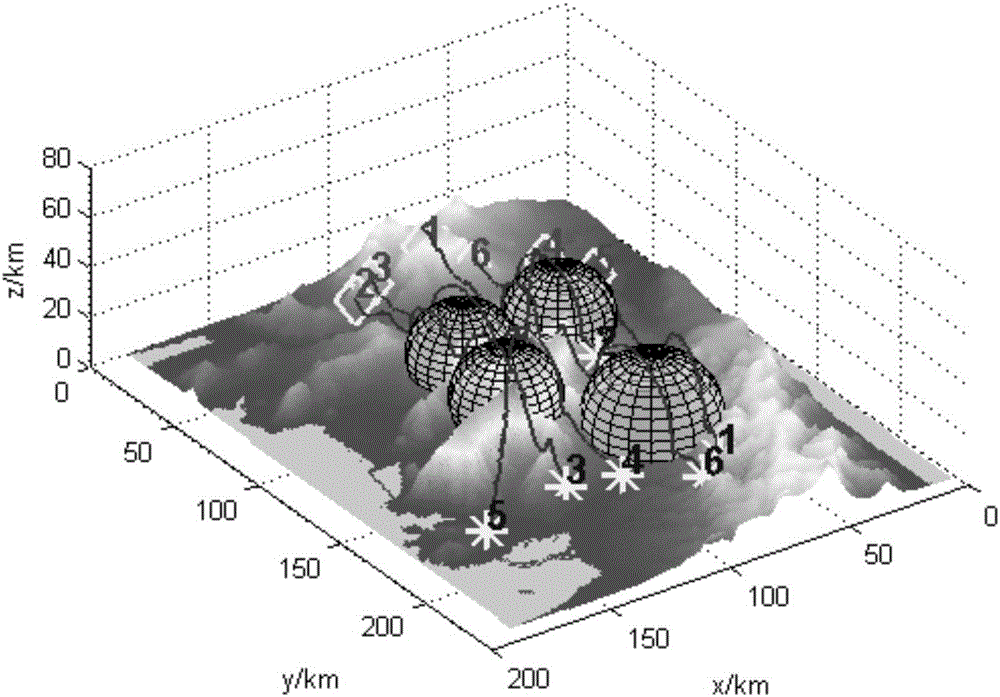
[0053] Embodiment two, see Figure 1-11 As shown, a multi-UAV cooperative multi-target allocation method includes the following content:
[0054] First, number multiple drones and multiple targets respectively, use 1, 2, ..., U to represent the drone number, 1, 2, ..., T to represent the target number, where U represents the drone Quantity, T represents the target quantity. Multiple UAVs are distributed before take-off, and it is assumed that the positions of all UAVs and all targets are known before target allocation. Each drone must be assigned to a target, and each target must have a drone corresponding to it.
[0055] Then, according to the size relationship between U and T and the UAV flight cost parameters, the flight cost model F(x) is constructed, where the size relationship between U and T includes three situations: U>T, U=T and U<T , UAV flight cost parameters include: voyage cost, execution time cost, damage cost,
[0056] The voyage cost is expressed as: Amon...
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
PUM
Login to View More
Abstract
The invention relates to a multiple-unmanned-aerial-vehicle cooperated multi-target distribution method which comprises the steps of firstly numbering a plurality of unmanned aerial vehicles and a plurality of targets, wherein U represents the number of the unmanned aerial vehicles and T represents the number of the targets; then constructing a flight cost model according to magnitudes of U and T and an unmanned aerial vehicle flight cost parameter, wherein the unmanned aerial vehicle flight cost parameter comprises a flight range cost, an execution time cost and a damage cost; and finally performing optimized solving on the flight cost model by means of a heuristicgenetic algorithm until a requirement for an optimized target is satisfied. According to the multiple-unmanned-aerial-vehicle cooperated multi-target distribution method, through adding the unmanned aerial vehicle damage cost in the flight cost, three most basic conditions are extracted for modeling for aiming at a relationship between the unmanned aerial vehicles and the number of targets so that a model approaches to reality; and in target distribution, the heuristicgenetic algorithm is utilized. Through introducing heuristic information, algorithm execution efficiency is effectively increased and a precocity problem of the genetic algorithm is prevented. The multiple-unmanned-aerial-vehicle cooperated multi-target distribution method is better than a basic genetic algorithm and a differential evolutionalgorithm at aspects of convergence speed and convergence value.
Description
technical field [0001] The invention belongs to the technical field of multi-UAV collaborative control, and particularly relates to a multi-UAV cooperative multi-target allocation method, which adopts a heuristic genetic algorithm when performing target allocation, and has faster convergence speed by introducing heuristic information. Avoid the premature problem of genetic algorithm. Background technique [0002] With its simplicity and flexibility, drones play an important role in replacing humans to complete dangerous, boring and harsh tasks. The complex flight environment and diverse mission requirements make multi-UAV collaboration a trend. Multi-UAV collaborative multi-target assignment is to assign specific tasks to UAVs based on the overall task requirements, comprehensively considering flight, environment and task constraints, so as to improve the efficiency of task completion. The multi-UAV cooperative multi-objective allocation problem is a combinatorial optimiza...
Claims
the structure of the environmentally friendly knitted fabric provided by the present invention; figure 2 Flow chart of the yarn wrapping machine for environmentally friendly knitted fabrics and storage devices; image 3 Is the parameter map of the yarn covering machine
Login to View More
Application Information
Patent Timeline
Application Date:The date an application was filed.
Publication Date:The date a patent or application was officially published.
First Publication Date:The earliest publication date of a patent with the same application number.
Issue Date:Publication date of the patent grant document.
PCT Entry Date:The Entry date of PCT National Phase.
Estimated Expiry Date:The statutory expiry date of a patent right according to the Patent Law, and it is the longest term of protection that the patent right can achieve without the termination of the patent right due to other reasons(Term extension factor has been taken into account ).
Invalid Date:Actual expiry date is based on effective date or publication date of legal transaction data of invalid patent.



 Login to View More
Login to View More  Login to View More
Login to View More